Институт науки и технологий Тэгу Кёнбук (DGIST, президент Ян Кук) Команда профессора Хонсу Чоя с факультета робототехники и мехатроники сотрудничала с командой профессора Сон-Вон Кима в Сеульской больнице Святой Марии Католического университета Кореи и профессора Брэдли Дж. Команда Нельсона из ETH Zurich разработала технологию, позволяющую производить более 100 микророботов в минуту, которые могут распадаться в организме.
Микророботы, предназначенные для минимально инвазивной целенаправленной прецизионной терапии, могут быть изготовлены различными способами. Среди них наиболее часто используется технология ультратонкой 3D- печати, называемая методом двухфотонной полимеризации, которая запускает полимеризацию путем пересечения двух лазеров в синтетической смоле. Эта технология позволяет создавать структуры с точностью до нанометра. Однако существует недостаток, заключающийся в том, что изготовление одного микроробота требует много времени, поскольку воксели, пиксели, реализованные с помощью 3D-печати, должны быть отверждены последовательно. Кроме того, магнитные наночастицы, содержащиеся в роботе, могут блокировать путь света в процессе двухфотонной полимеризации. Этот результат процесса может быть неоднородным при использовании магнитных наночастиц с высокой концентрацией.
Чтобы преодолеть ограничения существующего метода производства микророботов, исследовательская группа профессора DGIST Хонсу Чоя разработала метод создания микророботов с высокой скоростью 100 в минуту путем пропускания смеси магнитных наночастиц и метакрилата желатина, который является биоразлагаемым и может быть вылечен свет, в микрофлюидный чип. Это более чем в 10 000 раз быстрее, чем при использовании существующего метода двухфотонной полимеризации для производства микророботов.
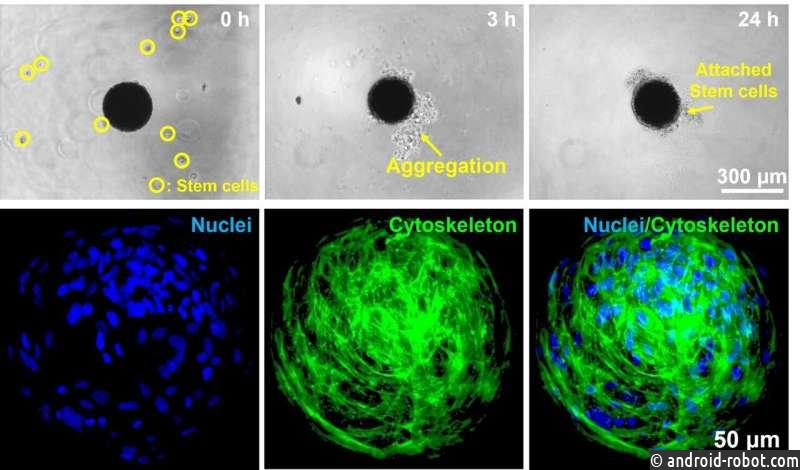
Затем микроробот, полученный с помощью этой технологии, культивировали со стволовыми клетками носовых раковин человека, собранными из носа человека, чтобы вызвать прилипание стволовых клеток к поверхности микроробота. В ходе этого процесса был изготовлен микроробот, несущий стволовые клетки, включая магнитные наночастицы внутри и стволовые клетки, прикрепленные к внешней поверхности. Робот движется, поскольку магнитные наночастицы внутри робота реагируют на внешнее магнитное поле и могут быть перемещены в желаемое положение.
Селективная доставка клеток была затруднена в случае существующей терапии стволовыми клетками. Однако микроробот, несущий стволовую клетку, может перемещаться в желаемое место, контролируя магнитное поле , создаваемое системой управления электромагнитным полем, в режиме реального времени. Исследовательская группа провела эксперимент, чтобы проверить, может ли микроробот, несущий стволовые клетки, достичь целевой точки, пройдя через микроканал в форме лабиринта, и, следовательно, подтвердила, что робот может двигаться в нужное место.
Кроме того, способность микроробота к деградации оценивали путем инкубации стволовой клетки, несущей микроробот, с разрушающим ферментом. После 6 часов инкубации микроробот полностью распался, а магнитные наночастицы внутри робота были собраны магнитным полем, генерируемым системой управления магнитным полем. Стволовые клетки были пролиферированы в том месте, где микроробот был разрушен. Затем стволовые клетки индуцировали для дифференцировки в нервные клетки .подтвердить нормальную дифференцировку; стволовые клетки дифференцировались в нервные клетки примерно через 21 день. Этот эксперимент подтвердил, что доставка стволовых клеток в желаемое место с помощью микроробота возможна и что доставленные стволовые клетки могут служить в качестве целевого прецизионного терапевтического агента, демонстрируя пролиферацию и дифференцировку.
Кроме того, исследовательская группа подтвердила, имеют ли стволовые клетки, доставленные микророботом, нормальные электрические и физиологические характеристики. Конечная цель этого исследования — убедиться, что стволовые клетки, доставляемые роботом, нормально выполняют свою роль моста в состоянии, когда связь между существующими нервными клетками разорвана. Для подтверждения этого использовали нейроны гиппокампа, выделенные из эмбриона крысы, которые стабильно излучают электрические сигналы . Соответствующую клетку прикрепляли к поверхности микроробота, культивировали на электродном чипе микроразмера и через 28 дней наблюдали электрические сигналы от нейронов гиппокампа . Благодаря этому было проверено, что микроробот должным образом выполняет свою роль платформы доставки клеток.
Профессор DGIST Хонсу Чой сказал: «Мы ожидаем, что технологии, разработанные в ходе этого исследования, такие как массовое производство микророботов, точная работа с электромагнитными полями, а также доставка и дифференцировка стволовых клеток, значительно повысят эффективность целенаправленной прецизионной терапии в будущем. »
Между тем, результаты этого исследования были опубликованы 23 июня в научном журнале Small.