Роботы-помощники, как правило, представляют собой мобильные роботы, предназначенные для помощи людям в торговых центрах, аэропортах, медицинских учреждениях, дома и в различных других условиях. Среди прочего, эти роботы могут помочь пользователям ориентироваться в незнакомой среде, например, направляя их в определенное место или делясь с ними важной информацией.
Хотя возможности вспомогательных роботов значительно улучшились за последнее десятилетие, системы, которые до сих пор были реализованы в реальных условиях, еще не способны эффективно следовать за людьми или направлять их в людных местах. На самом деле обучение роботов отслеживанию конкретного пользователя при навигации в динамической среде, характеризующейся множеством случайно движущихся «препятствий», — далеко не простая задача.
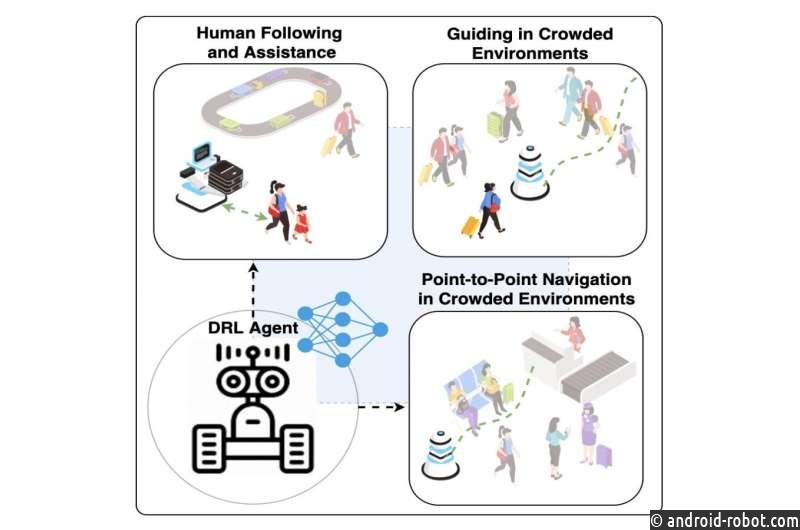
Исследователи из Берлинского технологического института недавно представили новую модель, основанную на глубоком обучении с подкреплением, которая может позволить мобильным роботам направлять конкретного пользователя в нужное место или следовать за ним/ней, неся свои вещи, и все это в людной среде. Эта модель, представленная в статье, предварительно опубликованной на arXiv, может помочь значительно расширить возможности роботов в торговых центрах, аэропортах и других общественных местах.
«Задача направлять или следовать за человеком в людных местах, таких как аэропорты или вокзалы, для переноски груза или товаров по-прежнему остается открытой проблемой», — написали в своей статье Лин Кестнер, Бассель Фатлоун, Чжэнчэн Шен, Даниэль Гавриш и Йенс Ламбрехт. . «В этих случаях использования робот должен не только разумно взаимодействовать с людьми, но и безопасно перемещаться среди толпы».
Когда они обучали свою модель, исследователи также включали семантическую информацию о состояниях и поведении пользователей-людей (например, разговоры, бег и т. д.). Это позволяет их модели принимать решения о том, как лучше помочь пользователям, двигаясь вместе с ними в одинаковом темпе и не сталкиваясь с другими людьми или ближайшими препятствиями.
«Мы предлагаем агент, основанный на глубоком обучении с подкреплением, для выполнения задач, выполняемых человеком, в многолюдной среде», — написали исследователи в своей статье. «Поэтому мы включаем семантическую информацию, чтобы предоставить агенту информацию высокого уровня, такую как социальное состояние людей, модели безопасности и типы классов».
Чтобы проверить эффективность своей модели, исследователи провели серию тестов с использованием arena-rosnav, среды двумерного (2D) моделирования для обучения и оценки моделей глубокого обучения . Результаты этих испытаний были многообещающими, поскольку искусственный агент в смоделированных сценариях мог как направлять людей в определенные места, так и следовать за ними, регулируя свою скорость в соответствии со скоростью пользователя и избегая ближайших препятствий.
«Мы оцениваем предложенный нами подход в сравнении с эталонным подходом без семантической информации и продемонстрировали повышенную безопасность и надежность навигации», — пишут исследователи в своей статье. «Более того, мы демонстрируем, что агент может научиться адаптировать свое поведение к людям, что значительно улучшает взаимодействие человека и робота».
Модель глубокого обучения с подкреплением , разработанная этой группой исследователей, показала себя хорошо в симуляциях, поэтому теперь ее эффективность необходимо будет проверить с использованием физических роботов в реальных условиях. В будущем эта работа может проложить путь к созданию более эффективных роботов-помощников для аэропортов, вокзалов и других многолюдных общественных мест.