Ученые с факультета машиностроения Университета Осаки представили метод производства сложных микророботов, приводимых в действие химической энергией, с использованием интеграции на месте. Благодаря 3D-печати и сборке механических структур и приводов микророботов внутри микрофлюидного чипа получившиеся микророботы смогли выполнять желаемые функции, такие как перемещение или хватание. Эта работа может помочь реализовать видение микрохирургии, выполняемой автономными роботами.
По мере развития медицинских технологий все более сложные операции, которые когда-то считались невозможными, стали реальностью. Однако мы все еще далеки от обещанного будущего, в котором микророботы, курсирующие по телу пациента, смогут выполнять такие процедуры, как микрохирургия или удаление раковых клеток.
Хотя методы нанотехнологий уже освоили искусство создания крошечных структур , по-прежнему сложно манипулировать этими составными частями и собирать их в функциональных сложных роботов, особенно при попытке их массового производства. В результате сборка, интеграция и реконфигурация крошечных механических компонентов и особенно подвижных приводов, приводимых в действие химической энергией , остается сложным и трудоемким процессом.
Теперь группа исследователей, в которую входят Моришима и Ван из Университета Осаки, Хирацука из Японского передового института науки и технологий (JAIST) и Нитта из Университета Гифу, разработали новый метод 3D-печати микророботов с несколькими компонентными модулями внутри одного и того же устройства. микрожидкостный чип. Мягкие структуры микророботов производятся с помощью сияющего лазерного света для отверждения фотоиндуцируемого биосовместимого гидрогеля, диакрилата поли(этиленгликоля).
«В последнее время разработка микророботов переходит от жестких и жестких структур к мягким и гибким архитектурам», — говорит первый автор Инчжэ Ван. Поэтапный процесс был упрощен и оптимизирован по сравнению с предыдущими методами за счет сборки различных модулей на месте или на месте.
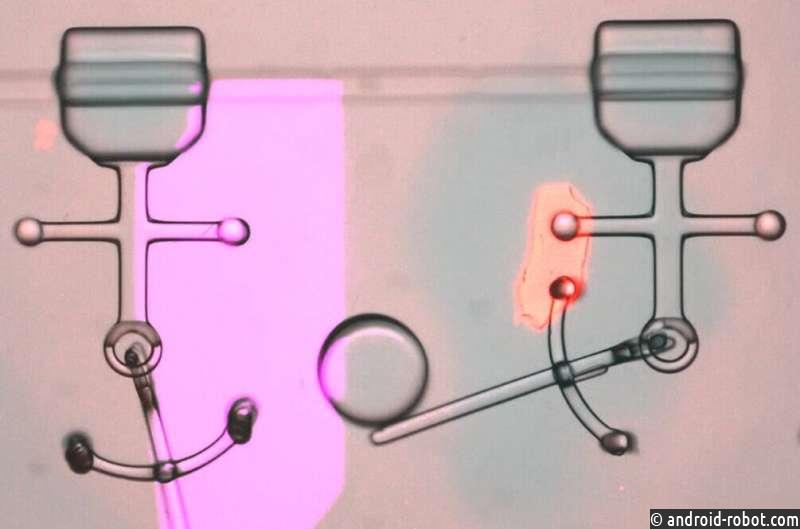
Конвейерный подход команд позволил им объединить различные модули, такие как суставы, захваты или искусственные мышцы, в одно устройство. Успешная интеграция различных функций возможна для широкого спектра микророботов с масштабируемым массовым производством. Для этой работы исследователи продемонстрировали несколько различных типов, включая захват, рыбу и руку робота.
«Наша интеграция актуаторов и механических структур на месте повысила гибкость и эффективность изготовления микророботов, что может помочь решить сложную в настоящее время проблему массового производства», — говорит старший автор Кейсуке Морисима. Помимо применения в здравоохранении, эти роботы также могут помочь в изготовлении еще более сложных роботов, выступая в роли микрожидкостных клапанов или манипуляторов.