Роботизированные системы будут внедрены в самых разных реальных условиях, от дорог до торговых центров, офисов, аэропортов и медицинских учреждений. Однако, чтобы постоянно хорошо работать в этих средах, роботы должны быть в состоянии хорошо справляться с неопределенностью, адаптируясь к неожиданным изменениям в окружающей среде, обеспечивая при этом безопасность находящихся поблизости людей.
Роботизированные системы, которые могут автономно адаптироваться к неопределенности в ситуациях, когда людям может угрожать опасность, называются «самоадаптивными системами, критически важными для безопасности». Хотя многие робототехники пытались разработать эти системы и повысить их производительность, до сих пор отсутствует четкая и общая теоретическая основа, которая бы их определяла.
Исследователи из Университета Виктории в Канаде недавно провели исследование, направленное на четкое определение понятия «самоадаптивная система, критически важная для безопасности». Их документ, предварительно опубликованный на arXiv, представляет собой ценную основу, которую можно использовать для классификации этих систем и отличия их от других роботизированных решений.
«Самоадаптивные системы широко изучались», — написали Саймон Димерт и Йенс Вебер в своей статье. «В этом документе предлагается определение критической с точки зрения безопасности самоадаптирующейся системы, а затем описывается таксономия для классификации адаптаций по различным типам на основе их влияния на безопасность системы и обоснование безопасности системы».
Основная цель работы Димерта и Вебера заключалась в том, чтобы формализовать идею «самоадаптивных систем, критически важных для безопасности», чтобы робототехники могли лучше понять ее. Для этого исследователи сначала предложили несколько четких определений для двух терминов, а именно «критическая для безопасности самоадаптирующаяся система» и «безопасная адаптация».
Согласно их определению, чтобы быть самоадаптирующейся системой, критически важной с точки зрения безопасности, робот должен соответствовать трем ключевым критериям. Во-первых, он должен удовлетворять внешнему принципу адаптации Вейнса, что в основном означает, что он должен быть способен автономно справляться с изменениями и неопределенностью в своей среде, а также с самой системой и ее целями.
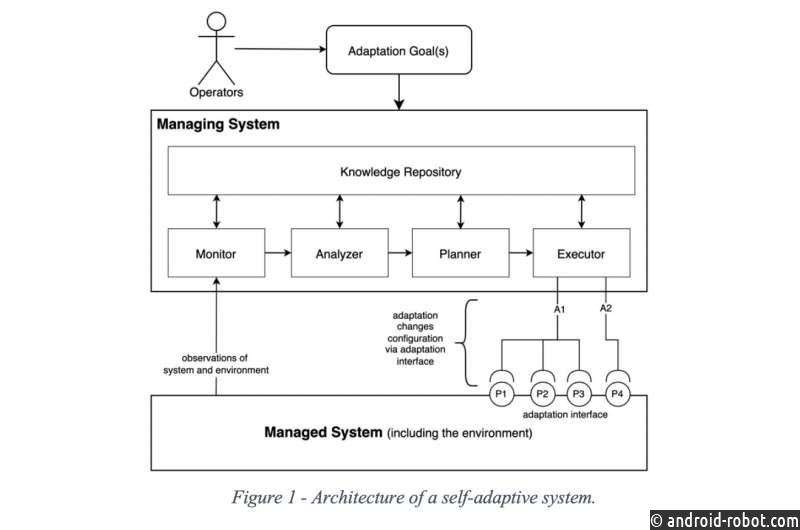
Чтобы быть критически важной с точки зрения безопасности и самоадаптирующейся, система также должна удовлетворять внутреннему принципу адаптации Вейнса, который предполагает, что она должна внутренне развиваться и корректировать свое поведение в соответствии с изменениями, которые она испытывает. Для этого он должен состоять из управляемой системы и управляющей системы.
В этой структуре управляемая система выполняет основные системные функции, а управляющая система со временем адаптирует управляемую систему. Наконец, управляемая система должна быть способна эффективно выполнять критически важные для безопасности функции (т. е. выполнять действия, которые при ненадлежащем выполнении могут привести к инцидентам и неблагоприятным событиям).
С другой стороны, данное исследователями определение «безопасной адаптации» основано на двух ключевых идеях. Они заключаются в том, что управляемый компонент роботизированной системы несет ответственность за любые аварии в окружающей среде, а управляющий компонент отвечает за любые изменения в конфигурации управляемой системы. Основываясь на этих двух понятиях, Димерт и Вебер определяют «безопасную адаптацию» следующим образом:
«Вариант безопасной адаптации — это вариант адаптации, который при применении к управляемой системе не приводит и не способствует достижению управляемой системой опасного состояния», — пишут исследователи в своей статье. «Безопасное адаптационное действие — это адаптационное действие, которое при выполнении не приводит к возникновению опасности и не способствует возникновению опасности. Из этого следует, что безопасная адаптация — это такая адаптация, при которой все варианты адаптации и адаптационные действия безопасны».
Чтобы лучше определить значение «безопасной адаптации» и то, что отличает ее от любой другой формы «адаптации», Димерт и Вебер также разработали новую таксономию, которую можно использовать для классификации различных адаптаций, осуществляемых самоадаптирующимися системами. В этой таксономии особое внимание уделяется безопасности или опасностям, связанным с различными адаптациями.
«Таксономия выражает критерии классификации, а затем описывает конкретные критерии, которым должно удовлетворять обоснование безопасности для самоадаптирующейся системы, в зависимости от типа выполненных адаптаций», — написали Димерт и Вебер в своей статье. «Каждый тип в таксономии проиллюстрирован на примере критической с точки зрения безопасности самоадаптирующейся системы водяного отопления».
Таксономия, описанная Димертом и Вебером, классифицирует адаптации, выполняемые самоадаптивными роботизированными или вычислительными системами, по четырем широким категориям, называемым типом 0 (отсутствие вывода), типом I (статическая уверенность), типом II (ограниченная уверенность) и типом. III (динамическое обеспечение). Каждая из этих категорий адаптации связана с определенными правилами и характеристиками.
Недавняя работа этой группы исследователей может послужить ориентиром для будущих исследований, посвященных разработке самоадаптирующихся систем, предназначенных для работы в критических с точки зрения безопасности условиях. В конечном счете, его можно использовать для лучшего понимания потенциала этих систем для различных реальных реализаций.
«Следующим шагом в этом направлении исследования является проверка предложенной таксономии, чтобы продемонстрировать, что она способна классифицировать все типы критически важных с точки зрения безопасности самоадаптирующихся систем и что обязательства, налагаемые таксономией, уместны с использованием комбинации систематической литературы. обзоры и тематические исследования », — заключают Димерт и Вебер в своей статье.