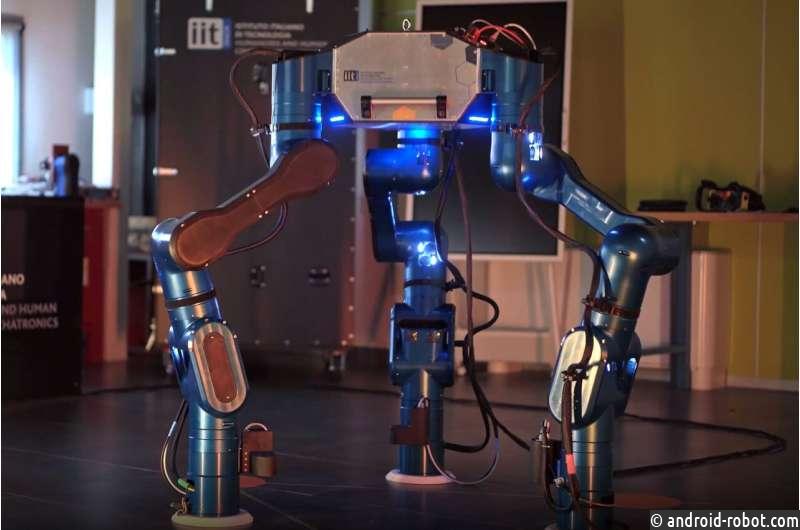
MARM, новый трехногий робот для перевозки грузов и манипулирования компонентами в космосе.
Исследователи из Istituto Italiano di Tecnologia (IIT — Итальянский технологический институт) недавно разработали новый прототип роботизированной платформы для космических приложений. Новый робот, названный MARM, имеет три конечности, которые можно использовать для ходьбы, перемещения, захвата и транспортировки модулей полезной нагрузки, а также самостоятельно перемещаться по космической инфраструктуре в условиях микрогравитации.
Робот предназначен для помощи астронавтам в сборке и обслуживании инфраструктуры, пока они находятся в космосе или, в будущем, на других планетах. Прототип MARM будет испытан в составе физического тренажера до разработки версии, пригодной для использования в космосе. Робот был разработан и изготовлен IIT в сотрудничестве с Leonardo SpA и GMV.
Применение роботов в области освоения космоса представляет собой уникальную среду, условия и возможности для разработки новых платформ. На самом деле, хотя технологии, необходимые для роботизированного управления, передвижения и манипулирования на Земле, достаточно развиты, условия орбитальной среды, такие как микрогравитация, ставят новые задачи перед сообществом исследователей робототехники.
Разработка инструментов, помогающих астронавтам в установке, осмотре, обслуживании и ремонте космической инфраструктуры, является целью проекта MIRROR (многорукий установочный робот для подготовки ORU и отражателей), в котором родился новый робот. Поэтому в рамках проекта MIRROR исследователи ИИТ реализовали платформу MARM (Multi-Arm Relocatable Manipulator), которая представляет собой прототип роботизированной системы, способной выполнять захват, транспортировку и сборку модулей, при этом сам перемещаясь по космической инфраструктуре.
Робот был разработан и изготовлен Лабораторией мехатроники IIT, ориентированной на человека и гуманоидов, которую координирует Николаос Цагаракис в сотрудничестве с Leonardo SpA и GMV. Робот MARM представляет собой последнее поколение роботов, созданных командой Николаоса Цагаракиса, поэтому его исследовательская группа в IIT разработала и произвела также робота-гуманоида WALK-MAN и робота, похожего на кентавра, CENTAURO, и работает над модульным конфигурируемым коллаборативным роботом CONCERT.
Роботизированная платформа MARM состоит из центрального корпуса, трех конечностей и стыковочного устройства (полезного как для питания, так и для отправки/получения данных). Он был построен в соответствии с вычислительным подходом к проектированию, который учитывал и оптимизировал производительность, связанную с мобильностью и гибкостью. Кинематика и транспортно-эксплуатационная способность были протестированы как в присутствии, так и в отсутствие силы тяжести с учетом различных кинематических моделей, которые отличались длиной и конструкцией конечностей, звеньев и суставов.
Таким образом, платформа MARM может использовать свои три конечности для перемещения, захватывая стандартные межсоединения на поверхностях станции и ползая по ним, а также для сборки и размещения компонентов (в частности, модульных шестигранных плит шириной 1,2 м и толщиной 0,2 м, весом около 12 кг) и манипулировать так называемыми орбитальными сменными блоками (ORU).
Три конечности MARM, которые соединены с основанием центрального таза, представляют собой главное отличие этого робота от ранее разработанных технологий: три конечности наделяют робота большей гибкостью передвижения и манипулирования и, в то же время, более широким диапазоном манипуляций, что позволяет ему перевозить большие полезные нагрузки, а также собирать и устанавливать их даже в двуручном режиме.
Кроме того, благодаря расположению трех конечностей робот способен выполнять движения всего тела, находясь в нужном положении, конечности, используемые для закрепления, могут облегчить операцию сборки, регулируя центральное основание таза MARM, уменьшая силы, передаваемые на ферму станции. Это одно из основных преимуществ наличия нескольких конечностей вместо использования одной и той же конечности для ползания и сборки.
Согласно предполагаемому сценарию, платформа MARM сможет с помощью своих электромеханических и управляющих компонентов, а также благодаря системе восприятия и непрерывному обмену входными/выходными данными забирать полезную нагрузку из хранилища, перемещаться во время ее переноски и собрать его в нужном месте.
Прототип платформы MARM будет использоваться для оценки описанного выше сценария в физическом тренажере, чтобы оценить осуществимость такого решения до разработки версии, пригодной для использования в космосе.