Скромный тихоокеанский слепыш, Emerita Analoga, вот-вот наделает много шума. Исследователи Калифорнийского университета в Беркли представили уникального робота, вдохновленного этим роющим ракообразным, который когда-нибудь может помочь оценить почву на сельскохозяйственных участках, собрать морские данные и изучить состояние почвы и горных пород на строительных площадках.
В исследовании, опубликованном 10 октября в Frontiers in Robotics & AI , Ханна Стюарт, доцент кафедры машиностроения, и ее команда продемонстрировали одного из первых роботов на ногах, которые могут самостоятельно закапываться вертикально. Этот копающий робот, названный EMBUR (EMerita BUrrowing Robot), использует новую конструкцию ног для достижения движения вниз, которое имитирует способ, которым тихоокеанские землекопы закапываются в пляжный песок.
Скротовые крабы делают рытье нор легким, но, по словам Лауры Трирс, ведущего автора исследования и доктора философии. студенту факультета машиностроения в исследовательской группе Стюарта Embodied Dexterity трудно двигаться вниз по гранулированным средам, таким как песок и почва. Чем глубже копает животное, тем сильнее отталкиваются зерна, затрудняя раскопки.
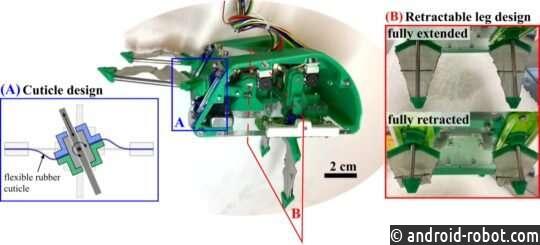
Чтобы преодолеть эту проблему и создать копатель с вертикальными ногами, исследователи сконструировали ноги робота так, чтобы они реагировали на анизотропную силу, что означает, что они испытывают гораздо большую силу в одном направлении, чем в другом. Как у пловца, мягкие тканевые ноги этого робота расширяются при больших усилиях во время рабочего гребка, но складываются и втягиваются во время обратного гребка.
«Недавно были достигнуты некоторые успехи в создании анизотропных опор для гранулированных сред, но это первый случай, когда они были успешно реализованы на свободно роющемся роботе», — сказал Трирс.
Исследователи также должны были придумать способ предотвратить попадание песчинок в механизмы робота и их заклинивание. Они снова обратились за вдохновением к тихоокеанскому землекопу.
«Мы создали кутикулу, аналогичную артродиальной мембране краба-крота», — сказал Трирс. «Это мягкий, гибкий материал, который выстилает отверстия суставов, чтобы предотвратить попадание зерен внутрь, но при этом позволяет свободно двигаться».
Трирс отмечает, что, хотя роботы освоили такие условия, как земля, космос и море, они не добились значительных успехов под землей. Например, очень немногие роботы могут самостоятельно закапываться под собственным весом, как EMBUR.
Роботы, способные исследовать подземные условия, могут использоваться в самых разных отраслях и областях исследований. Приложения включают измерение качества почвы потенциальных сельскохозяйственных угодий, геотехническую инженерию, сбор морских данных, а также строительство и земляные работы. Кроме того, они могут служить небольшими складными якорями для морских транспортных средств или космических вездеходов, чтобы обеспечить связанную совместную работу между роботами.
EMBUR также может способствовать нашему научному пониманию других роющих животных, которых трудно наблюдать и изучать под землей. «Робофизические модели или прототипы роботов, такие как EMBUR, могут помочь биологам лучше понять биомеханику этих животных», — сказал Триерс.
Чтобы спроектировать ноги для EMBUR, Стюарт и Трирс работали с соавторами Робертом Фуллом, профессором интегративной биологии, электротехники и компьютерных наук, и Бенджамином Макинроем, доктором философии. студент группы выпускников биофизики, чтобы наблюдать и анализировать крабов-кротов в лаборатории. Они быстро поняли, что пять пар ног животного можно разделить на две группы, которые движутся в противоположных направлениях друг к другу. Они также заметили закономерность вставки, подметания и втягивания, причем последнее, по-видимому, уменьшало сопротивление при обратном ходе. Затем они попытались воспроизвести обе функции в конструкции ноги робота.
Затем исследователи использовали физические модели для оценки сил, воздействующих на ноги, чтобы направить их в роботизированную реализацию.
«Мы использовали технику моделирования, известную как Теория силы сопротивления [RFT], чтобы смоделировать силы, испытываемые ногами на всем протяжении их широких траекторий», — сказал Трирс. «RFT помог нам понять, какая геометрия и поведение роботов позволяют наиболее успешно копать землю».
С помощью EMBUR исследователи из Беркли показали, что рытье нор возможно в сухой среде при правильных условиях. Они считают это первым шагом к созданию системы, способной закапываться в более широком диапазоне условий и типов субстратов, как на настоящем пляже.
«Мы планируем улучшить конструкцию, чтобы можно было глубже копать и исследовать лучшие методы моделирования, такие как DEM [методы дискретных элементов], чтобы помочь предсказать поведение робота», — сказал Триерс. «В конце концов, я бы хотел, чтобы этот робот мог копать в реальных условиях на пляже, как животное, и переключаться между бегом, плаванием и копанием».