Ученый-компьютерщик из Университета Мэриленда Динеш Маноча в сотрудничестве с командой коллег из Baidu Research и Университета Гонконга разработал фотореалистичную систему моделирования для обучения и проверки правильности вождения транспортных средств. Новая система обеспечивает более богатое и более аутентичное моделирование, чем современные системы, в которых используются игровые движки или высококачественная компьютерная графика и математически воспроизводимые шаблоны трафика.
Их система, называемая расширенным автономным моделированием вождения (AADS), может упростить оценку технологии самостоятельного вождения в лаборатории, а также обеспечить более надежную безопасность до начала дорогостоящих дорожных испытаний.
Ученые описали свою методологию в исследовательской работе, опубликованной 27 марта 2019 года в журнале Science Robotics .
«Эта работа представляет собой новую парадигму моделирования, в которой мы можем проверить надежность и безопасность технологии автоматического вождения, прежде чем развернуть ее на реальных автомобилях и протестировать на шоссе или городских дорогах», — сказал Маноча, один из авторов статьи, и профессор с совместными назначениями в области компьютерных наук, электротехники и вычислительной техники и Института компьютерных исследований Университета Мэриленда.
Одно из потенциальных преимуществ автомобилей с самостоятельным вождением состоит в том, что они могут быть более безопасными, чем водители-люди, склонные к отвлечению, усталости и эмоциональным решениям, которые приводят к ошибкам. Но для обеспечения безопасности автономные транспортные средства должны в обязательном порядке оценивать и реагировать на условия вождения. Учитывая бесчисленные ситуации, с которыми автомобиль может столкнуться на дороге, автономная система вождения требует тест-драйвов на сотни миллионов миль в сложных условиях, чтобы продемонстрировать надежность.
Хотя это может занять десятилетия, чтобы выполнить в дороге, предварительные оценки могут быть проведены быстро, эффективно и более безопасно с помощью компьютерного моделирования, которое точно представляет реальный мир и моделирует поведение окружающих объектов. Современные современные системы моделирования, описанные в научной литературе, не позволяют изобразить фотореалистичные среды и представить реальные схемы движения транспорта или поведение водителя.
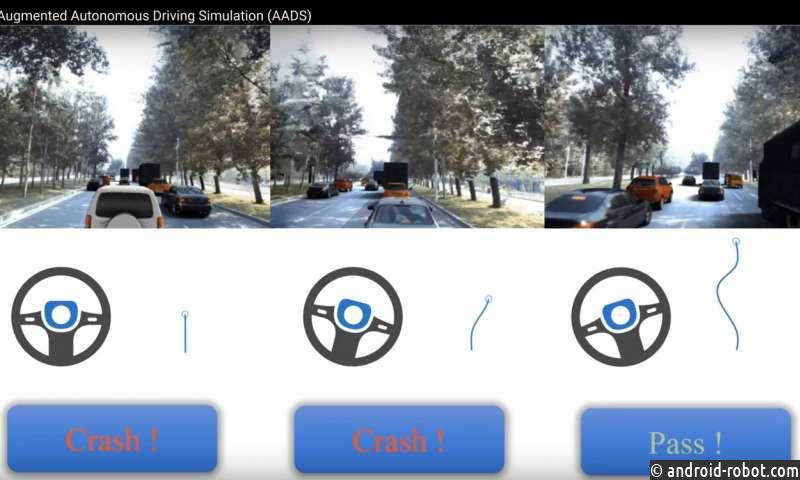
AADS — это система, управляемая данными, которая более точно отображает данные, которые автомобиль с самостоятельным управлением получает на дороге. Автомобили с самостоятельным вождением полагаются на модуль восприятия, который получает и интерпретирует информацию о реальном мире, и модуль навигации, который принимает решения, например, куда следует направить или сломать или ускорить, основываясь на модуле восприятия.

В реальном мире модуль восприятия автомобиля с автоматическим управлением обычно получает данные от камер и лидарных датчиков, которые используют световые импульсы для измерения расстояний вокруг. В современной технологии симулятора модуль восприятия получает входные данные от компьютерных изображений и математически смоделированных моделей движения для пешеходов, велосипедов и других автомобилей. Это относительно грубое представление о реальном мире. Это также дорого и требует много времени для создания, потому что компьютерные модели изображений должны быть созданы вручную.
Система AADS объединяет фотографии, видео и лидарные облака точек — которые похожи на трехмерную визуализацию формы — с реальными данными о траектории для пешеходов, велосипедов и других автомобилей. Эти траектории могут использоваться для прогнозирования поведения вождения и будущих положений других транспортных средств или пешеходов на дороге для более безопасной навигации.
«Мы визуализируем и моделируем реальный мир, используя видео и фотографии, — сказал Маноча, — но мы также фиксируем реальное поведение и модели движения. Способ, которым люди управляют, нелегко уловить с помощью математических моделей и законов физики. Итак, мы извлекли данные о реальных траекториях из всех имеющихся у нас видео, и мы смоделировали поведение вождения с использованием методологий социальных наук. Этот подход, основанный на данных, дал нам гораздо более реалистичный и полезный симулятор трафика ».
Ученые столкнулись с давней проблемой, которую необходимо преодолеть при использовании реальных видеоизображений и лидарных данных для их моделирования: каждая сцена должна реагировать на движения самодвижущегося автомобиля, даже если эти движения не были зафиксированы оригинальной камерой или датчиком лидара. , Какой бы угол или точку обзора не был захвачен фотографией или видео, он должен быть визуализирован или смоделирован с использованием методов прогнозирования. Вот почему технология моделирования всегда в значительной степени опиралась на компьютерную графику и методы прогнозирования на основе физики.
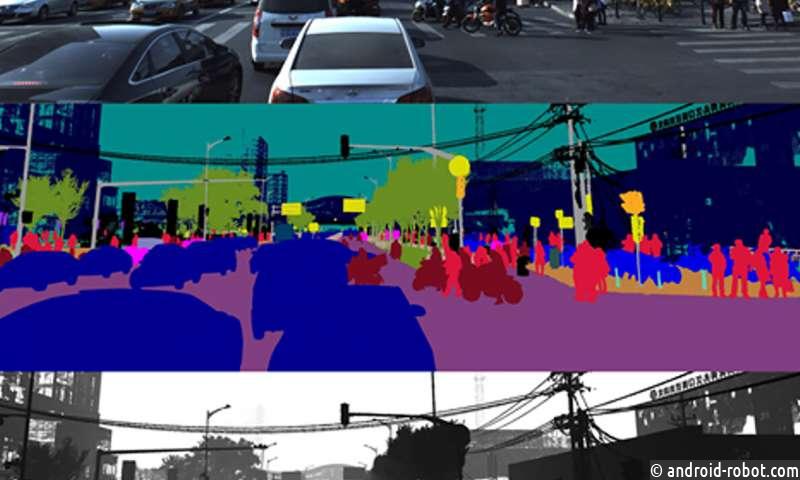
Чтобы преодолеть эту проблему, исследователи разработали технологию, которая изолирует различные компоненты реальной уличной сцены и отображает их как отдельные элементы, которые можно повторно синтезировать для создания множества фотореалистичных сценариев вождения.
С AADS транспортные средства и пешеходы могут быть подняты из одной среды и помещены в другую с надлежащим освещением и движениями. Дороги могут быть воссозданы с различными уровнями трафика. Несколько углов обзора каждой сцены обеспечивают более реалистичные перспективы при смене полосы движения и поворотах. Кроме того, передовая технология обработки изображений обеспечивает плавные переходы и уменьшает искажения по сравнению с другими методами моделирования видео . Методы обработки изображений также используются для извлечения траекторий и тем самым моделирования поведения водителя.
«Поскольку мы используем реальное видео и реальные движения, наш модуль восприятия содержит более точную информацию, чем предыдущие методы», — сказал Маноча. «И затем, благодаря реалистичности симулятора, мы можем лучше оценить навигационные стратегии автономной системы вождения».
Маноча сказал, что, опубликовав эту работу, ученые надеются, что некоторые корпорации, разрабатывающие автономные транспортные средства, могут использовать тот же подход, основанный на данных, для улучшения своих собственных тренажеров для тестирования и оценки автономных систем вождения.