Базовая нейронная основа автоматического действия в сравнении с гибким исследованием движения.
Нейробиологи стремятся понять, как первичная моторная кора (M1) может регулировать точные движения, поддерживая при этом поведенческие исследования, которые сталкиваются с постоянными ошибками. В то время как постоянство в окружающей среде может помочь животным учиться и автоматизировать высоконадежные действия, они должны оставаться гибкими, чтобы адаптироваться к изменениям окружающей среды. В новом отчете, опубликованном в Nature Communications , Шравани Кондапувулур и исследовательская группа в области биоинженерии, медицины и неврологии из Калифорнийского университета в Сан-Франциско, США, разработали задачу «дотянуться до захвата» на крысах для мониторинга нейронной изменчивости первичная моторная кора (M1) и дорсолатеральное полосатое тело(ДЛС) регионов. Результаты показали, как моторные и полосатые области переходили между двумя режимами, генерируя надежный нейронный паттерн для автоматических и точных движений, по сравнению с вариабельным нейронным паттерном, наблюдаемым во время поведенческих исследований.
Как схемы движения в нашем мозгу поддерживают как автоматические действия, так и гибкое исследование движений?
Хотя подвижность и двигательные навыки определяются как быстрые, точные и последовательные действия , они также должны быть гибкими, чтобы приспосабливаться к поставленной задаче или к меняющейся среде . Связь между выработкой постоянных двигательных навыков и поведенческими исследованиями для исправления ошибок в настоящее время остается неуловимой. В системной нейробиологии первичная моторная кора рассматривается как двигатель для точного управления движением путем создания надежных последовательных импульсов .
В этой работе основной автор и доктор медицинских наук. исследователь Шравани Кондапувулур, которая в настоящее время завершает работу над докторской диссертацией в исследовательской группе доцента Карунеша Гангули из Калифорнийского университета в Сан-Франциско, описала схемы движения в нашем мозгу и их влияние на подвижность. «Каждый день большинство людей используют заученные движения для выполнения повседневных задач, таких как включение света в комнате или доставание кофейной кружки из шкафа», — сказала она.
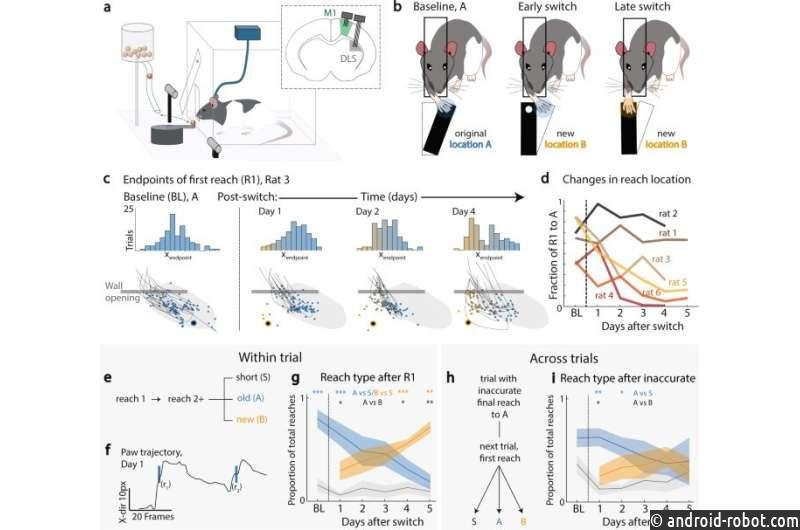
«Эти движения часто являются автоматическими — они производятся быстро, точно и последовательно, без особого обдумывания. Тем не менее, навык также должен оставаться гибким, чтобы легко приспосабливаться к изменениям в окружающей среде, например, переходу в другой дом с альтернативным выключателем света. и размещение шкафа». Поскольку процесс автоматического действия и гибкого движения обеспечивается цепями в нашем мозгу, Кондапувулур и др. стремились изучить лежащие в основе механизмы этого процесса на животной модели . «Сначала мы переучили крыс дотягиваться и хватать пищевую награду в одном месте. Затем мы переместили награду во второе, соседнее место и наблюдали, как они заново учились, где достать гранулу», — сказала она.
Экспериментальное перемещение награды за еду
Во время экспериментов команду особенно интересовала основная роль M1 (первичная моторная кора) и DLS (дорсолатеральное полосатое тело) для изменения навыков, при этом в значительной степени сохраняя исходное действие . Они добились этого, «записав активность мозга как в первичной двигательной области (M1), так и в нижестоящей двигательной области (DLS)». Кондапувулур далее оценил свои выводы: «Мы обнаружили, что повторное обучение было многодневным процессом с множеством ошибок, связанных с ранним достижением старого места». Она продолжила: «Интересно, что в день с наибольшим нарушением автоматических ошибок движения» они заметили «переключение мозговой активности M1 и DLS с постоянных паттернов во время задачи на значительно возросшую изменчивость от попытки к попытке».
Команда заметила тесную связь между установленным поведенческим исследованием; переход от высоко предсказуемой активации ансамбля в двух интересующих нейронных областях к вариабельному состоянию в обеих областях. На следующий день Кондапувулур и др. продолжили эксперименты, чтобы показать, что изменение автоматического навыка — это многодневный процесс.
Восстановление поведенческой гибкости со временем
Затем ученые попытались понять нейронные корреляты .восстановления поведенческой гибкости. Они наблюдали потерю ранее стабильной взаимосвязи поведения нейронных всплесков в двух областях и увеличение нейронной изменчивости, что совпало с целенаправленными поведенческими исследованиями и поведенческими изменениями в процессе переключения. По словам Кондапувулура и др., изучая потенциальную связь между переменной нейронной активностью и процессом поведенческого исследования, они показали, что «время максимального «общения» между двумя областями больше не было постоянно связано со временем достижения поведения». Результаты показали, что «постоянное или переменное время электрической активности в первичной двигательной области может вызывать соответственно последовательные и изменчивые движения».
Общая нейронная активность
В своей нервной архитектуре первичная моторная кора и области дорсолатерального полосатого тела (M1 и DLS) структурно моносинаптически связаны ; в то время как DLS также получает входные данные от множества других корковых и подкорковых областей. Поэтому Kondapuvulur et al. исследовали, остается ли, несмотря на потерю последовательного времени выполнения задачи, всплески популяции коррелированными друг с другом в двух регионах. Они достигли этого, изучив межобластную связь между двумя нейронными областями и то, как области менялись во время переменных сеансов, с помощью канонического корреляционного анализа , чтобы представить максимально коррелированную активность между областями, чтобы определить общую нейронную активность.
Перспектива
Команда написала: «Мы обнаружили, что переход от автоматических последовательных движений к гибкому исследованию включает в себя переход от последовательной к переменной активности двигательной области». Они сочли результат важным, поскольку «он демонстрирует другой отличный метод обучения движению, отличный от обучения новым навыкам, таким как игра на фортепиано, по сравнению с процессом адаптации, то есть обновлением быстрых движений перед лицом ошибок».
Таким образом, Шравани Кондапувулур и его коллеги стремились понять основную основу поведенческой гибкости во время автоматического выполнения сложного двигательного навыка. Они показали, что нейронные области первичной моторной коры (M1) в тандеме с областями дорсолатерального полосатого тела (DLS) обеспечивают гибкие переходы между поведенчески ригидным и исследовательским состояниями. Команда исследовала поведенческую гибкость досягаемости и хватки на модели грызунов в новом месте в ходе многодневного процесса. В работе обрисована связь двигательного навыка и привычки, чтобы показать, как автоматизм или бессознательное выполнение действия применимы к обоим случаям. Результаты подтверждают основную основу двигательной активности мозга во время предлагаемых действий.