На протяжении десятилетий исследователи во всем мире пытались разработать роботов, которые могли бы эффективно помогать людям и работать вместе с ними, выполняя различные повседневные задачи. Однако, чтобы сделать это эффективно, роботы должны иметь возможность естественным образом взаимодействовать с людьми, в том числе передавать им и получать от них предметы.
Исследователи из NVIDIA недавно разработали модель, которую можно использовать для улучшения способности роботов естественным образом передавать и получать объекты от людей. Этот подход, представленный в наборе документов, который будет представлен на ICRA 2022, основан на структуре под названием STORM , которую они представили в одной из своих предыдущих работ.
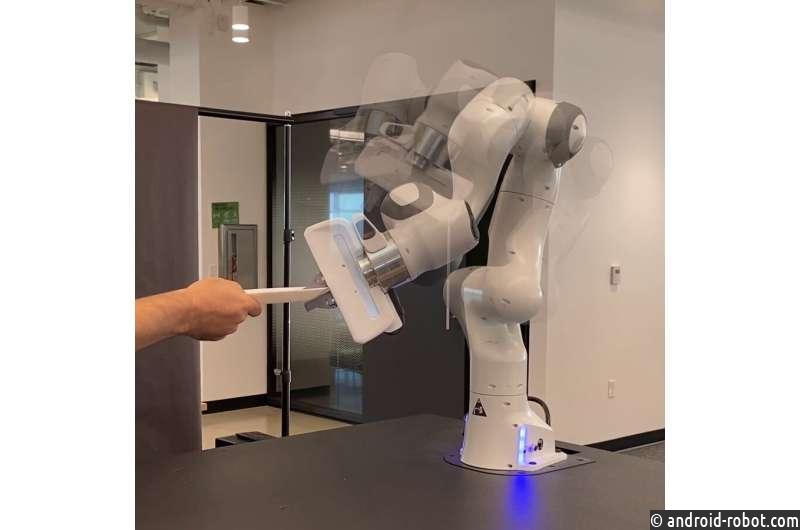
«В этой работе мы уделяем особое внимание тому, чтобы роботы могли отобрать любой предмет у пользователя-человека», — сказал TechXplore Дитер Фокс, один из исследователей, проводивших исследование. «Мы придумали решение, которое объединяет изученный подход к захвату с нашим подходом к интеллектуальному управлению, чтобы гарантировать, что эти передачи будут предсказуемыми, естественными и быстрыми, чтобы люди воспринимали робота как безопасного и полезного помощника».
Фокс и его коллеги из NVIDIA уже несколько лет работают над улучшением навыков манипулирования и взаимодействия роботов. Однако структура модели, представленной в их новой статье, отличается от подходов, представленных в их предыдущих работах.
В частности, их недавно представленный подход изначально использует изученную модель для прогнозирования нескольких способов, которыми робот может взять объект из рук человека. Затем, вместо использования простого алгоритма на основе правил для определения того, какой из этих способов более эффективен, он определяет оптимальный подход с помощью STORM, структуры прогнозирующего управления моделью (MPC), ранее созданной командой.
«Наш подход MPC, получивший название STORM, работает путем выборки множества различных возможных движений, которые робот может совершить от текущего местоположения до того места, где находится объект», — объяснил Фокс. «Он использует вычисления графического процессора для оценки этих траекторий, что позволяет нам быстро проверить 500 из них параллельно».
Модель, созданная Фоксом и его коллегами, обновляет управляющие решения робота несколько раз в секунду. В конечном итоге это позволяет ему быстро адаптировать запланированную траекторию робота и его решения о том, где брать объекты, на основе движений, выполняемых пользователем, с которым он сотрудничает.
«Эта работа показывает, как мы можем сочетать изученные методы захвата объекта и отслеживания человека с эффективным планированием движения для создания устойчивого, надежного и естественного поведения робота», — сказал Фокс. «Это обеспечивает основу для создания всех видов совместного поведения человека и робота».
Фокс и его коллеги оценили производительность своей модели в серии экспериментов, в которых роботы передавали и получали различные объекты, взаимодействуя с четырьмя пользователями. В этих тестах их подход дал очень многообещающие результаты, так как почти все участники чувствовали, что робот лучше сотрудничал с ними, когда работал на исследовательской платформе MPC, чем когда он был основан на базовом подходе.
В будущем новая модель, представленная этой командой в NVIDIA, может быть использована для повышения производительности как существующих, так и вновь разработанных роботов в задачах, связанных с манипулированием объектами в тесном сотрудничестве с людьми. Между тем, команда планирует разработать другие инструменты для улучшения взаимодействия человека и робота.
«В более широком смысле такие подходы, которые сочетают в себе возможности глубокого обучения с рассуждениями на основе планирования, будут полезны для многих приложений», — добавил Фокс. «В наших следующих исследованиях мы хотели бы изучить более общие системы совместной работы человека и робота, чтобы позволить роботу эффективно работать с людьми, а также изучить возможность виртуального обучения этих робототехнических систем в смоделированных средах и развертывания обученных моделей в реальных условиях. Мировые роботы».