Исследователи из Института аэрокосмических исследований Университета Торонто (UTIAS) представили пару высокотехнологичных инструментов, которые могут повысить безопасность и надежность автономных транспортных средств за счет улучшения логических способностей их роботизированных систем.
Инновации касаются отслеживания нескольких объектов — процесса, используемого роботизированными системами для отслеживания положения и движения объектов, включая транспортные средства, пешеходов и велосипедистов, для планирования пути беспилотных автомобилей в густонаселенных районах.
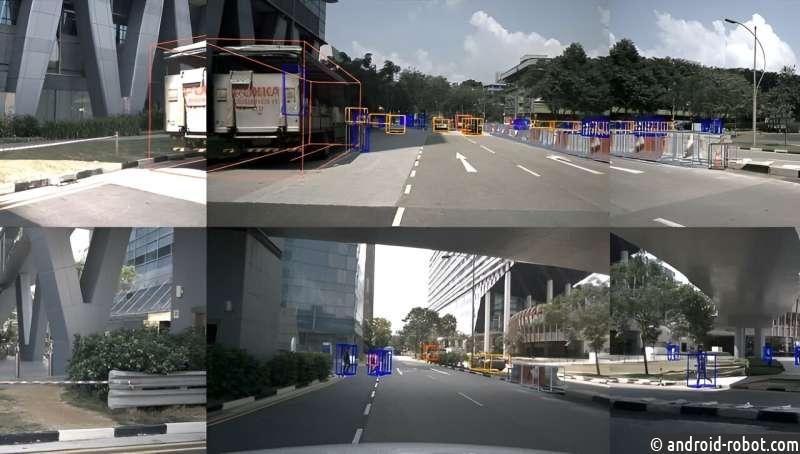
Информация отслеживания собирается с датчиков компьютерного зрения (2D-изображения с камер и 3D-сканирования LIDAR) и фильтруется по каждой временной отметке 10 раз в секунду для прогнозирования будущего движения движущихся объектов.
«После обработки это позволяет роботу выработать некоторые рассуждения об окружающей среде. Например, человек переходит улицу на перекрестке или велосипедист меняет полосу движения впереди», — говорит Сандро Папаис, доктор философии. студентка УТИАС на факультете прикладных наук и инженерии. «В каждую временную отметку программное обеспечение робота пытается связать текущие обнаружения с объектами, которые он видел в прошлом, но оно может вернуться только на определенный период времени».
В новом документе, представленном на Международной конференции по робототехнике и автоматизации 2024 года в Иокогаме, Япония, Папаис и соавторы Роберт Рен, студент третьего курса инженерных наук, и профессор Стивен Васлендер, директор Лаборатории робототехники и искусственного интеллекта UTIAS в Торонто, представляют Трекер скользящего окна (SWTrack) — метод оптимизации на основе графиков, который использует дополнительную временную информацию для предотвращения пропуска объектов.
Работа появляется на сервере препринтов arXiv.
Этот инструмент предназначен для повышения эффективности методов отслеживания, особенно когда объекты закрыты с точки зрения робота.
«SWTrack расширяет то, как далеко в прошлое учитывает робот при планировании», — говорит Папайс. «Таким образом, вместо того, чтобы ограничиваться тем, что он видел только один кадр назад, и тем, что происходит сейчас, он может просмотреть последние пять секунд, а затем попытаться проанализировать все разные вещи, которые он видел».
Команда протестировала, обучила и проверила свой алгоритм на полевых данных , полученных через nuScenes, общедоступный крупномасштабный набор данных для беспилотных транспортных средств, которые эксплуатируются на дорогах городов по всему миру. Данные включают в себя человеческие аннотации, которые команда использовала для оценки производительности SWTrack.
Они обнаружили, что каждый раз, когда они увеличивали временное окно максимум до пяти секунд, эффективность отслеживания улучшалась. Но за последние пять секунд производительность алгоритма замедлилась из-за времени вычислений.
«Большинству алгоритмов отслеживания было бы сложно разобраться в некоторых из этих временных промежутков. Но в нашем случае мы смогли подтвердить, что можем отслеживать в течение этих более длительных периодов времени и поддерживать более последовательное отслеживание динамических объектов вокруг нас», — говорит Папаис.
Папаис говорит, что он с нетерпением ждет возможности развить идею улучшения памяти роботов и распространить ее на другие области робототехнической инфраструктуры. «Это только начало», — говорит он. «Мы работаем над проблемой отслеживания, а также над другими проблемами роботов, где мы можем включить больше временной информации для улучшения восприятия и роботизированного мышления».
В другой статье, соавтором которой являются магистранты Чанг Вон (Джон) Ли и Васлендер, представлена UncertaintyTrack — набор расширений для 2D-методов отслеживания путем обнаружения, которые используют вероятностное обнаружение объектов.
«Вероятностное обнаружение объектов дает количественную оценку неопределенности обнаружения объектов», — объясняет Ли. «Ключевым моментом здесь является то, что для задач, критически важных для безопасности, вы хотите знать, когда прогнозируемые обнаружения могут вызвать ошибки в последующих задачах, таких как отслеживание нескольких объектов. Эти ошибки могут возникать из-за условий низкой освещенности или окклюзия тяжелым предметом.
«Оценки неопределенности дают нам представление о том, когда модель вызывает сомнения, то есть когда она с высокой вероятностью дает ошибки в прогнозах. Но существует этот пробел, потому что вероятностные детекторы объектов в настоящее время не используются для отслеживания объектов с несколькими треками».
Ли работал над статьей в рамках своей диссертации по инженерным наукам. Сейчас он учится в магистратуре лаборатории Васландера и исследует обнаружение визуальных аномалий для Canadarm3, вклада Канады в лунный аванпост Gateway под руководством США. «В моем текущем исследовании мы стремимся разработать метод, основанный на глубоком обучении, который обнаруживает плавающие в космосе объекты, представляющие потенциальный риск для роботизированной руки», — говорит Ли.
Васландер говорит, что достижения, изложенные в двух статьях, основаны на работе, которой его лаборатория занимается уже несколько лет.
«[Лаборатория робототехники и искусственного интеллекта Торонто] уже несколько лет работает над оценкой неопределенности восприятия и расширением временных рассуждений о робототехнике, поскольку они являются ключевыми препятствиями на пути более широкого внедрения роботов в открытый мир», — говорит Васлендер.
«Нам отчаянно нужны методы искусственного интеллекта, которые смогут понять устойчивость объектов во времени, а также те, которые осознают свои собственные ограничения и будут останавливаться и рассуждать, когда на их пути появляется что-то новое или неожиданное. Именно на это направлено наше исследование».