Исследователи из Шанхайского университета Цзяо Тонг, Оксфордского университета и лаборатории Tencent Robotics X Lab недавно ввели политику безопасного управления мобильными роботами-манипуляторами с учетом конфигурации. Эта политика, представленная в документе, предварительно опубликованном на arXiv, может помочь лучше управлять движениями манипулятора, а также снизить риск его столкновения с объектами и другими препятствиями поблизости.
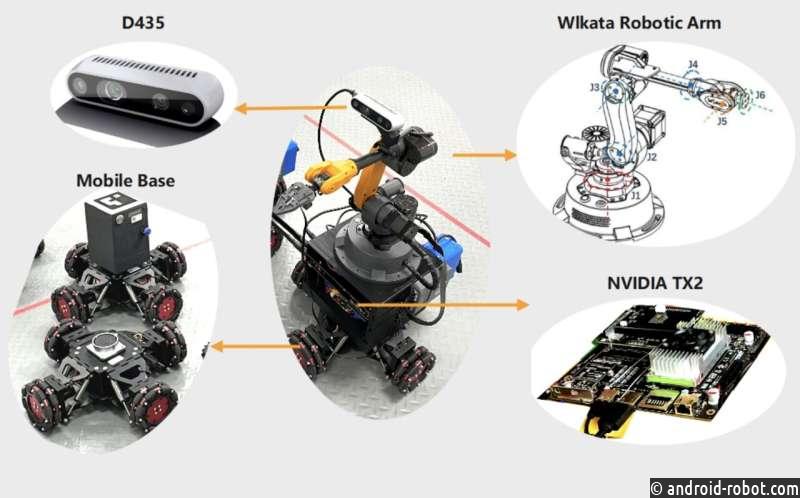
«Подготовка этой статьи включает в себя завершенную работу мобильного манипулятора по захвату на основе зрения и работу по избеганию препятствий, реализованную путем моделирования мобильного манипулятора в симуляции», — сказал TechXplore Фань Дин, один из исследователей, проводивших исследование. . «Основная цель этой статьи — использовать сконструированную мобильную манипуляторную систему для проверки предложенной нами теории управления безопасностью».
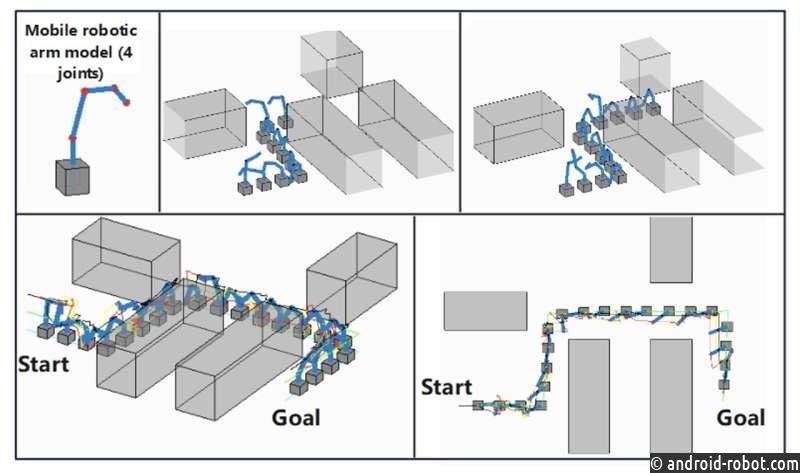
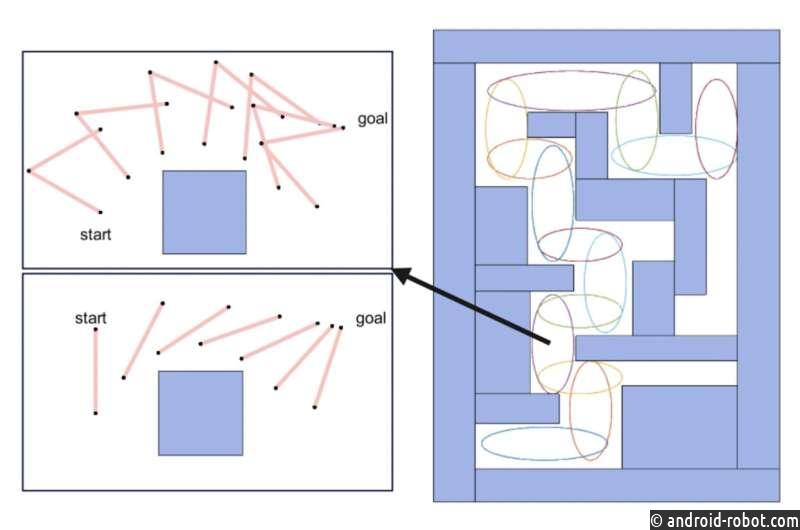
Новый закон, введенный Дингом и его коллегами, предназначен для направления мобильного робота-манипулятора в желаемую область пространства, предотвращая при этом его столкновение с близлежащими объектами или препятствиями . Команда специально создала этот закон в надежде, что он может улучшить производительность и безопасность роботов, работающих в среде с скоплением препятствий.
В отличие от других методов и политик, представленных в прошлом, подход, изложенный в недавней статье, также описывает пространственную структуру мобильного манипулятора. В конечном итоге это позволило исследователям более эффективно предотвращать столкновения с близлежащими объектами.
«Часть, учитывающая конфигурацию, в этой статье решает задачу захвата объектов, в то время как для задачи избегания препятствий мы устанавливаем эту часть как предварительное знание и не исследуем ее», — объяснил Дин. «Управление безопасностью мобильного манипулятора реализуется законом управления безопасностью в реальном масштабе времени, который получается путем решения квадратичной программы, содержащей конечное число ограничений барьерной функции управления, которые включают в себя пространственную структуру мобильного манипулятора. эффективность контроллера робота-манипулятора не будет сильно снижаться при усложнении пространственной конструкции».
До сих пор Дин и его коллеги оценивали свой подход в серии численных симуляций. Их результаты были очень многообещающими, предполагая, что их новая политика может помочь повысить безопасность и эффективность мобильного роботизированного манипулятора, к которому они ее применили.
«Наиболее заметным достижением является предложение онлайн-метода обхода препятствий с помощью мобильного манипулятора, который учитывает пространственную структуру мобильного манипулятора и хорошо масштабируется с размерами», — сказал Дин. «Его возможное влияние состоит в том, чтобы предложить осуществимое решение для мобильных роботов с высокой степенью свободы, позволяющее эффективно избегать препятствий».
В будущем исследователи надеются реализовать и оценить свой подход на реальных физических роботизированных руках, чтобы еще больше подтвердить его эффективность. Кроме того, их работа может вдохновить на разработку аналогичных подходов для снижения риска столкновения роботов с препятствиями в их окружении.
«В будущем часть, учитывающая конфигурацию, будет применяться для обхода препятствий мобильным манипулятором вместо использования окружающей среды в качестве априорного знания», — добавил Дин. «Кроме того, они планируют изучить рутинное планирование мобильной базы».