Большая часть мира покрыта океанами, которые, к сожалению, сильно загрязнены. Одна из стратегий борьбы с нагромождениями отходов, обнаруженными в этих очень уязвимых экосистемах, особенно вокруг коралловых рифов, заключается в том, чтобы использовать роботов для очистки. Однако существующие подводные роботы в основном громоздки с твердыми телами, не могут исследовать и брать пробы в сложных и неструктурированных средах и шумны из-за электрических двигателей или гидравлических насосов.
В поисках более подходящего дизайна ученые из Института интеллектуальных систем Макса Планка (MPI-IS) в Штутгарте обратились к природе за вдохновением. Они создали вдохновленного медузой универсального, энергоэффективного и почти бесшумного робота размером с ладонь. Jellyfish-Bot — результат сотрудничества между отделами физического интеллекта и робототехнических материалов MPI-IS. «Универсальная роботизированная платформа, похожая на медузу, для эффективного подводного движения и манипулирования» была опубликована в журнале Science Advances.
Для создания робота команда использовала электрогидравлические приводы, через которые проходит электричество. Приводы служат искусственными мышцами , приводящими в действие робота. Эти мышцы окружены воздушными подушками, а также мягкими и жесткими компонентами, которые стабилизируют робота и делают его водонепроницаемым. Таким образом, высокое напряжение, проходящее через приводы, не может контактировать с окружающей водой.
Блок питания периодически подает электричество по тонким проводам, заставляя мышцы сокращаться и расширяться. Это позволяет роботу изящно плавать и создавать завихрения под своим телом.
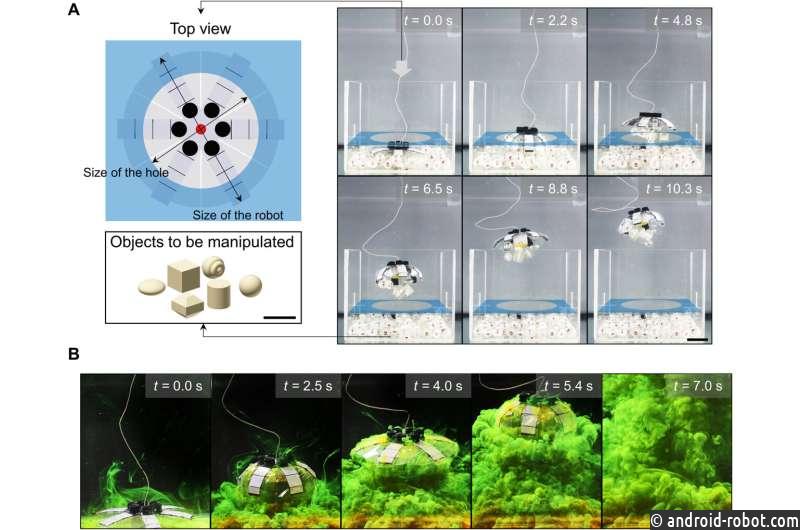
«Когда медуза плывет вверх, она может захватывать объекты на своем пути, создавая потоки вокруг своего тела. Таким образом, она также может собирать питательные вещества. Наш робот тоже циркулирует вокруг себя. Эта функция полезна при сборе объектов. Например, частицы отходов. Затем он может транспортировать мусор на поверхность, где он может быть переработан. Он также может собирать хрупкие биологические образцы, такие как рыбья икра. При этом нет негативного воздействия на окружающую среду с водными видами щадящий и почти бесшумный», — объясняет Тяньлу Ван.
Он является постдоком в отделе физической разведки в MPI-IS и первым автором публикации.
Его соавтор Хён-Джун Джу из отдела робототехнических материалов продолжает: «По оценкам, 70% морского мусора опускается на морское дно. Пластик составляет более 60% этого мусора, и для его разложения требуются сотни лет. увидели острую необходимость в разработке робота для манипулирования такими объектами, как мусор, и его транспортировки вверх. Мы надеемся, что подводные роботы однажды смогут помочь в очистке наших океанов».
Медузы-боты способны перемещать и захватывать объекты без физического контакта, действуя либо поодиночке, либо с несколькими в комбинации. Каждый робот работает быстрее, чем другие сопоставимые изобретения, достигая скорости до 6,1 см/с. Более того, для Jellyfish-Bot требуется только низкая входная мощность около 100 мВт.
И это безопасно для людей и рыб, если полимерный материал, изолирующий робота, однажды порвется. При этом шум от робота невозможно отличить от фонового уровня. Таким образом, робот-медуза мягко взаимодействует с окружающей средой, не нарушая ее — так же, как его естественный аналог.
Робот состоит из нескольких слоев: одни придают роботу жесткость, другие служат для того, чтобы удерживать его на плаву или изолировать. Дополнительный полимерный слой действует как плавающая оболочка. Искусственные мышцы с электроприводом, известные как HASEL, встроены в середину различных слоев. HASEL представляют собой заполненные жидким диэлектриком пластиковые пакеты, частично покрытые электродами. Приложение высокого напряжения к электроду заряжает его положительно, в то время как окружающая вода заряжается отрицательно.
Это создает силу между положительно заряженным электродом и отрицательно заряженной водой, которая толкает масло внутри мешочков вперед и назад, заставляя мешочки сокращаться и расслабляться, напоминая настоящую мышцу. HASEL могут выдерживать высокие электрические напряжения, создаваемые заряженными электродами, и защищены от воды изолирующим слоем. Это важно, так как мышцы HASEL никогда ранее не использовались для создания подводного робота.
Первым шагом была разработка Jellyfish-Bot с одним электродом с шестью пальцами или руками. На втором этапе команда разделила один электрод на отдельные группы, чтобы независимо активировать их.
«Мы добились захвата объектов, заставив четыре руки работать как пропеллеры, а две другие — как захваты. Или мы приводили в действие только часть рук, чтобы направлять робота в разных направлениях. Мы также изучили, как мы может управлять коллективом из нескольких роботов.Например, мы взяли двух роботов и дали им поднять маску, что очень сложно для одного робота.Два робота также могут сотрудничать при переноске тяжелых грузов.Однако на данный момент наш Jellyfish-Bot нуждается в проводе. Это недостаток, если мы действительно хотим использовать его однажды в океане», — говорит Хён-Джун Джу.
Возможно, провода, питающие роботов, скоро уйдут в прошлое. «Мы стремимся разработать беспроводных роботов. К счастью, мы сделали первый шаг к этой цели. Мы включили все функциональные модули, такие как аккумулятор и части беспроводной связи, чтобы в будущем можно было манипулировать беспроводной связью», — продолжает Тяньлу Ван.
Команда прикрепила блок плавучести к верхней части робота, а батарею и микроконтроллер — к нижней. Затем они взяли свое изобретение, чтобы поплавать в пруду кампуса Макса Планка в Штутгарте, и смогли успешно управлять им. Однако до сих пор они не могли заставить беспроводного робота изменить курс и плыть в другую сторону. Зная команду, достижение этой цели не займет много времени.




