Исследователи из Киотского университета и Университета Нагоя в Японии недавно разработали новый автоматический подход к проектированию роботов, которые могут одновременно улучшать их форму, структуру, движения и компоненты управления. Этот подход, представленный в статье, опубликованной в журнале «Искусственная жизнь и робототехника », черпает вдохновение в эволюции позвоночных, широкой категории животных, обладающих позвоночником или позвоночником, в которую входят млекопитающие, рептилии, птицы, амфибии и рыбы.
«Конструкция автоматического робота — это совершенно новый исследовательский проект для лаборатории Мацуно , лаборатории, возглавляемой Фумитоши Мацуно, и это первая статья, опубликованная для этого проекта», — сказал TechXplore Рёсуке Койке, один из исследователей, проводивших исследование. . «Наша главная цель заключалась в том, чтобы спроектировать хорошо работающего робота для конкретной задачи. Поскольку существует бесчисленное количество возможных комбинаций морфологий роботов и контроллеров, невозможно создать лучший робот с помощью ручного исследования человека. Поэтому мы поняли, что это необходимо. создать метод автоматического проектирования роботов с помощью компьютеров».
По сути, вместо того, чтобы разрабатывать единый дизайн робота для конкретного приложения, Койке и его коллеги хотели изучить возможность создания системы, которая может автоматически создавать конструкции роботов с определенной морфологией и характеристиками. Если бы такая система работала эффективно, она могла бы в конечном итоге упростить разработку специализированных роботизированных систем.
Наиболее примечательной особенностью системы автоматического проектирования роботов является то, что она частично вдохновлена эволюцией позвоночных. В частности, Койке и его коллеги предположили, что по мере их эволюции на протяжении веков количество костей в телах позвоночных имело тенденцию к уменьшению.
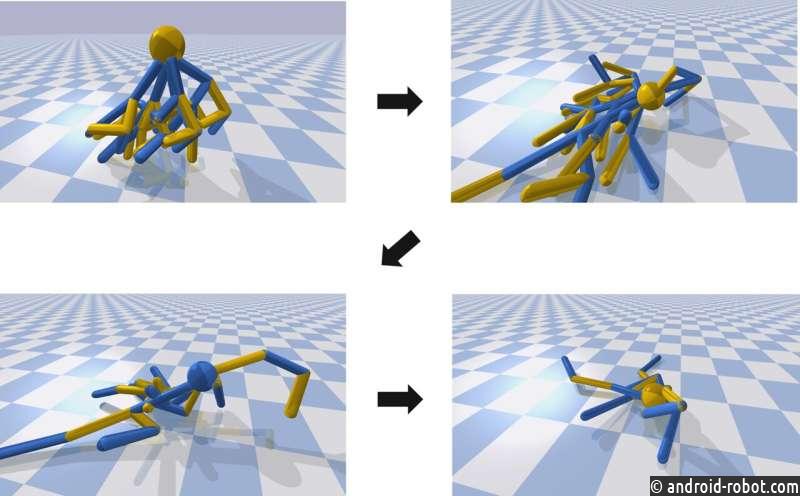
Их система следует так называемому «правилу улучшения», основанному на этой гипотезе. В частности, его обучали проектировать роботов, удаляя ненужные жесткие части из ранее разработанного сложного робота. Это, в свою очередь, позволяет определить более эффективные морфологии и компоненты контроллера для нового робота.
«Существующие шагающие роботы часто имеют морфологию, напоминающую позвоночных, например собак», — пояснил Койке. «Имитируя эволюцию позвоночных, мы могли бы создавать роботов с производительностью, сравнимой с этими практическими роботами. Кроме того, мы надеемся, что в идеале морфология, более развитая, чем у сегодняшних позвоночных, появится и будет работать лучше».
Койке и его коллеги оценили свой метод автоматического проектирования роботов в серии тестов, в которых они сравнили его с другими стратегиями проектирования роботов. Они обнаружили, что правило улучшения метода, вдохновленное эволюцией позвоночных, привело к созданию упрощенных и, тем не менее, интересных конструкций роботов.
«Дискретные факторы морфологии робота — сколько жестких частей требуется роботу и как они должны быть соединены — трудно обработать теоретически, поэтому они в значительной степени зависят от опыта и интуиции проектировщиков», — сказал Койке. «Или, в недавних исследованиях, посвященных автоматическому проектированию роботов, они часто исследовались почти исчерпывающим образом. Мы сделали поиск более эффективным, установив простое правило: монотонно уменьшать количество жестких частей».
В будущем метод автоматического проектирования роботов, представленный этой группой исследователей, может быть реализован в реальных условиях для ускорения и улучшения проектирования роботов. Кроме того, эта работа может вдохновить на разработку других систем, основанных на гипотезе сохранения эволюции позвоночных.
В своих следующих исследованиях Койке и его коллеги планируют изучить потенциал других возможных подходов к автоматическому проектированию роботов, которые не обязательно будут вдохновлены эволюцией позвоночных. Кроме того, недавно они создали альтернативный метод, устраняющий некоторые ограничения их подхода к проектированию роботов, который вскоре будет представлен в новой журнальной статье.
«Пока что мы только подтвердили эффективность этого метода при ходьбе и обнаружили, что он требует много времени для изучения и лишь немного превосходит существующие методы», — добавил Койке. «Люди изобрели колесо, чтобы эффективно перемещаться по плоской местности. По мере расширения морфологии роботов даже колесо должно быть изобретено автоматически. Если существует механизм лучше, чем колесо, автоматический дизайн робота должен даже быть в состоянии изобрести его. , по мере расширения круга задач она должна изобретать более совершенные летательные аппараты, корабли, промышленных роботов и так далее».