Животные всегда были большим источником вдохновения для роботизированных систем, поскольку они предлагают захватывающие естественные примеры того, как различные структуры тела могут производить определенные движения и стили передвижения. В то время как большинство роботов, вдохновленных животными, вдохновлены видами животных с ногами, некоторые робототехники изучают потенциал роботов с телами, которые напоминают тела других животных, включая змей.
Роботы, вдохновленные змеями, обладают уникальными характеристиками, которые могут сделать их более подходящими, чем другие роботы, для некоторых технологических приложений. Например, их гибкие и змеиные движения могут сделать их удобными для проведения минимально инвазивных операций и эндоскопических вмешательств, проникновения в тело пациента через нос и последующего достижения целевых областей.
Несмотря на их преимущества, существующие методы управления этими роботами на расстоянии не особенно эффективны. В первую очередь это связано с тем, что, хотя змееподобные роботы гиперизбыточны (т. е. имеют большое или бесконечное число степеней свободы), электронные устройства , используемые для управления их движениями, часто позволяют пользователям указать только шесть степеней свободы.
Чтобы преодолеть это ограничение, группа исследователей из Университета Лейбница в Ганновере недавно разработала новую стратегию интуитивного и удаленного управления движениями сверхизбыточных роботов-змей. Эта стратегия, представленная в статье, предварительно опубликованной на arXiv , позволяет пользователям изменять движения и ориентацию змееподобного робота, при этом как можно меньше изменяя его форму.
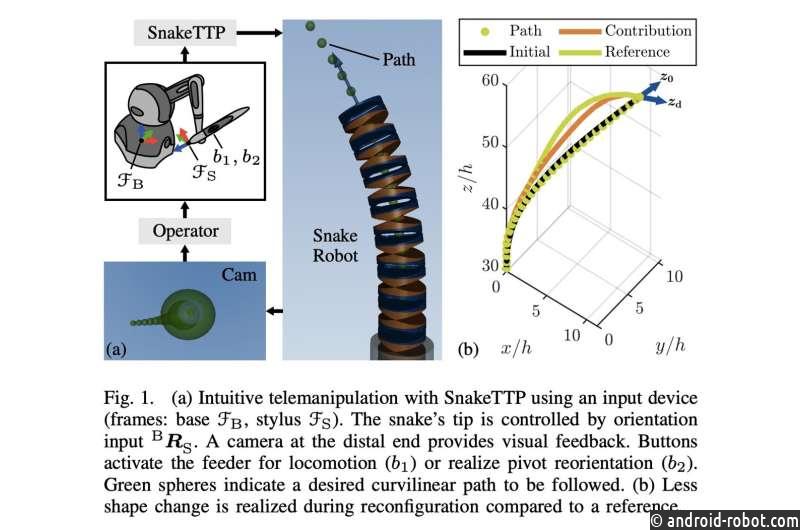
«В этой статье представлен SnakeTTP, унифицированный алгоритм интуитивного телеманипулирования, реализующий передвижение и переориентацию поворота для эндоскопических задач», — написали Тим-Лукас Хабич и его коллеги в своей статье. «Новый метод, основанный на инверсной кинематике с приоритетом задачи, позволяет использовать различные спецификации положения и ориентации с наивысшим приоритетом и подгонку формы в пределах нулевого пространства. Подгонка формы выполняется путем максимального сходства двух кривых с использованием расстояния Фреше при одновременном указании положения и ориентации концевой эффектор».
Хабич и его коллеги оценили свой алгоритм SnakeTTP, попросив 14 участников исследования управлять движениями смоделированного робота-змеи и доставить его в целевую область в смоделированной среде. Их результаты были весьма многообещающими, так как пользователи, управляющие имитацией робота-змеи, могли успешно выполнять задачу передвижения, а также могли переориентировать движения робота в пределах целевой области, при этом как можно меньше изменяя его форму.
«Новый подход к подгонке формы, основанный на расстоянии Фреше, уменьшает ошибку формы до 20,1% по сравнению с классической стратегией, использующей евклидово расстояние между текущим и желаемым положением ссылки», — написали Хабич и его коллеги в своей статье.
Хотя новый алгоритм управления, представленный этой группой исследователей, дал многообещающие результаты, пока он тестировался только на смоделированных роботах. Будущие тесты в реальных условиях и с использованием настоящих роботов-змей могут еще больше подтвердить его эффективность.
В конечном счете, алгоритм может позволить исследователям управлять роботами-змеями и другими сверхизбыточными роботами (например, роботами, вдохновленными щупальцами осьминога) с большей точностью, а также лучше воспроизводить движения, подобные змее или щупальцам. Это, в свою очередь, может облегчить развертывание этих роботов в медицинских учреждениях, особенно для выполнения минимально инвазивных хирургических процедур внутри человеческого тела.