При разработке новых технологий ученые-компьютерщики и робототехники часто черпают вдохновение у животных и других живых организмов. Это позволяет им искусственно воспроизводить сложное поведение и модели передвижения, чтобы повысить производительность, эффективность и возможности своих систем.
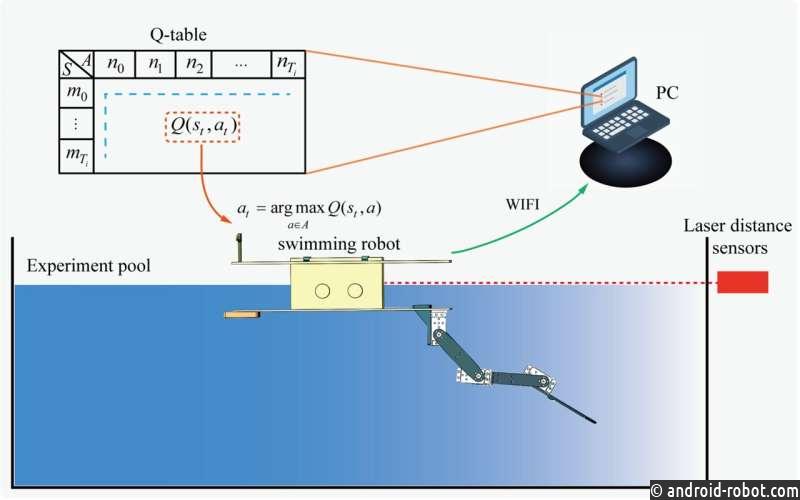
Исследователи из Чжэцзянского научно-технического университета и Университета Эссекса недавно разработали метод обучения с подкреплением , который можно использовать для управления движениями одноногого робота , похожего на бобра . Их метод, представленный в статье, опубликованной в Robotics and Autonomous Systems, позволяет роботу автономно научиться выполнять плавательные движения, которые напоминают движения бобров.
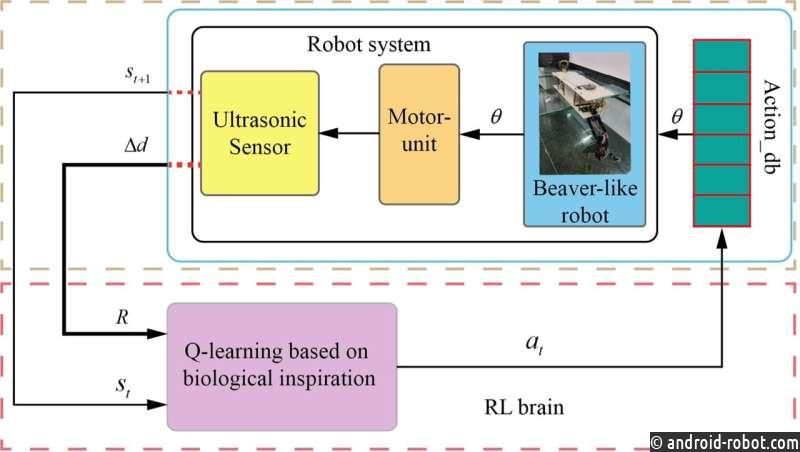
«В этом исследовании мы представляем биологический метод управления обучением с подкреплением для моделирования движения подводных роботов», — сказал TechXplore Ганг Чен, один из исследователей, проводивших исследование. «Этот метод в основном основан на одной из наших предыдущих работ по изучению движения бобров, опубликованной в журнале Springer Link’s Journal of Intelligent & Robotic Systems».
Подводные роботы, подобные созданному Ченом и его коллегами, представляют собой нелинейные системы, и их движения включают сложную гидродинамику. Таким образом, точное моделирование их движения может быть очень сложной задачей, требующей значительных вычислительных ресурсов.
В отличие от других моделей управления движением подводных роботов, представленных в прошлом, подход, разработанный Ченом и его коллегами, не требует интеграции сложных моделей движения, основанных на гидродинамике. В основном это связано с тем, что он основан на упрощенных представлениях углов суставов, которые динамически воспроизводят плавательные движения бобров. Эти совместные представления облегчают обучение модели, а также уменьшают неэффективные движения робота во время обучения.
«Объединяя обучение с подкреплением с механизмами, лежащими в основе плавательного поведения бобров, наш метод максимально быстро и эффективно реализует контроль робота над плаванием», — пояснил Чен. «Его наиболее заметным и уникальным преимуществом является то, что он позволяет избежать создания сложных моделей управления движением и быстро реализовать управление плаванием бобероподобного одноногого робота».
Чен и его коллеги оценили свой метод обучения с подкреплением, вдохновленный бобрами, в серии экспериментов с использованием одноногой роботизированной платформы. Их результаты были очень многообещающими, а их подход привел к эффективным плавательным движениям, подобным бобрам, которые улучшили передвижение робота.
В будущем метод, представленный этой группой исследователей, может быть использован для улучшения производительности и движений других одноногих роботов, предназначенных для работы в воде. Кроме того, их работа может вдохновить на разработку аналогичных подходов к управлению движениями других подводных роботов.
«В нашей будущей работе мы планируем улучшить структуру и производительность плавающего робота, похожего на бобра», — добавил Чен. «Мы также хотели бы исследовать способы улучшения интеллекта, лежащего в основе плавательных движений роботов , с помощью обучения с подкреплением, не только сосредотачиваясь на скорости плавания робота, но и на стабильности плавания, планировании траектории и избегании препятствий, и все это в реальной подводной среде».