Исследователи EPFL разработали метод, который позволяет роботу с машущими крыльями автономно приземляться на горизонтальную насест с помощью когтеобразного механизма. Нововведение может значительно расширить круг задач, выполняемых роботами.
Птица, приземлившаяся на ветку, делает этот маневр самым простым в мире, но на самом деле акт усаживания включает в себя чрезвычайно тонкий баланс времени, высоких сил удара, скорости и точности. Это движение настолько сложное, что ни один робот с машущими крыльями (орнитоптер) до сих пор не мог его освоить.
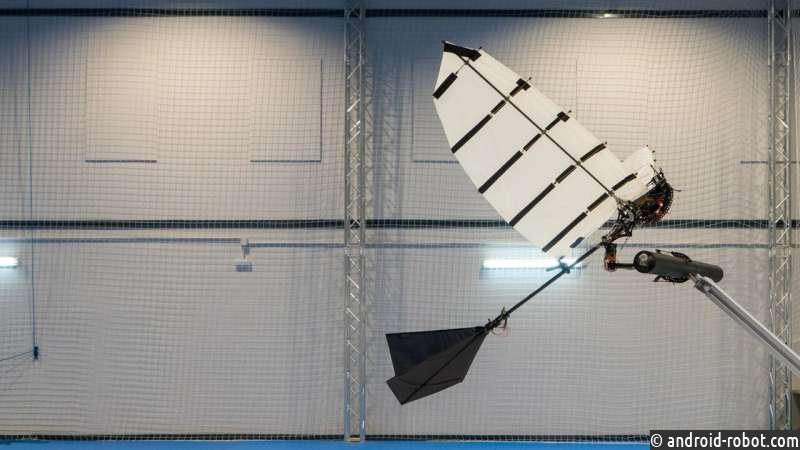
Рафаэль Зуфферей, научный сотрудник Лаборатории интеллектуальных систем (LIS) и Biorobotics ab (BioRob) в Инженерной школе, является первым автором недавней статьи Nature Communications , описывающей уникальное шасси, которое делает возможным такое сидение. Он построил и испытал его в сотрудничестве с коллегами из Университета Севильи, Испания, где сам 700-граммовый орнитоптер был разработан в рамках европейского проекта GRIFFIN.
«Это первая фаза более крупного проекта. Как только орнитоптер научится самостоятельно приземляться на ветку дерева, он сможет выполнять определенные задачи, такие как ненавязчивый сбор биологических образцов или измерения с дерева. даже приземляться на искусственные сооружения, что может открыть новые области применения», — говорит Цуфферей.
Он добавляет, что возможность приземлиться на насест может предоставить орнитоптерам, которые, как и многие беспилотные летательные аппараты (БПЛА) имеют ограниченный срок службы батареи, более эффективный способ перезарядки с использованием солнечной энергии , что потенциально делает их идеальными для дальних миссий.
«Это большой шаг к использованию роботов с машущими крыльями, которые на данный момент могут совершать только свободные полеты, для манипулятивных задач и других реальных приложений», — говорит он.
Максимальная сила и точность; минимальные вес и скорость
Инженерные проблемы, связанные с посадкой орнитоптера на насест без каких-либо внешних команд, требовали управления многими факторами, которые природа уже так идеально уравновесила. Орнитоптер должен был иметь возможность значительно замедляться, когда садился, сохраняя при этом полет. Коготь должен был быть достаточно сильным, чтобы ухватиться за насест и выдержать вес робота, но не настолько тяжелым, чтобы его нельзя было удержать в воздухе. «Это одна из причин, по которой мы выбрали одну клешню, а не две, — отмечает Зуффри. Наконец, робот должен был иметь возможность воспринимать свое окружение и насест перед ним в зависимости от собственного положения, скорости и траектории.
Всего этого исследователи добились, оснастив орнитоптер полностью бортовым компьютером и навигационной системой, которая была дополнена внешней системой захвата движения, помогающей ему определять свое положение. Придаток ноги-клешни орнитоптера был точно откалиброван, чтобы компенсировать колебания вверх-вниз во время полета, когда он пытался отточить и ухватиться за насест. Сама клешня была разработана таким образом, чтобы поглощать импульс движения робота при ударе и быстро и надежно закрываться, чтобы выдержать его вес. Оказавшись на насесте, робот остается на насесте без затрат энергии.
Даже с учетом всех этих факторов Зуфферей и его коллеги добились успеха, в конечном итоге создав не одного, а двух когтеобразных орнитоптеров, чтобы воспроизвести их результаты.
Заглядывая вперед, Zufferey уже думает о том, как их устройство можно было бы расширить и улучшить, особенно на открытом воздухе.
«На данный момент летные эксперименты проводятся в помещении, потому что нам нужна контролируемая зона полета с точной локализацией от системы захвата движения. В будущем мы хотели бы увеличить автономность робота для выполнения задач по усаживанию и манипулированию на открытом воздухе, в более непредсказуемой среде».