До сих пор микроскопическим роботизированным системам приходилось обходиться без рук. Теперь исследователи из ETH Zurich разработали стеклянную иглу с ультразвуковым приводом, которую можно прикрепить к роботизированной руке. Это позволяет им перекачивать и смешивать незначительные количества жидкости и улавливать частицы.

Роботы с подвижными руками выполняют механическую работу и могут быть запрограммированы. Один робот может использоваться для выполнения различных задач.
До сегодняшнего дня миниатюрные системы, транспортирующие незначительное количество жидкости через тонкие капилляры, не имели ничего общего с такими роботами. Разработанные исследователями в качестве вспомогательного средства для лабораторного анализа , такие системы известны как микрофлюидика или лаборатория на чипе и обычно используют внешние насосы для перемещения жидкости через чипы. На сегодняшний день такие системы было трудно автоматизировать, и микросхемы приходилось разрабатывать и изготавливать по индивидуальному заказу для каждого конкретного приложения.
Ультразвуковые колебания иглы
Ученые во главе с профессором ETH Дэниелом Ахмедом теперь объединяют обычную робототехнику и микрофлюидику. Они разработали устройство, которое использует ультразвук и может быть прикреплено к роботизированной руке. Он подходит для выполнения широкого круга задач в микроробототехнике и микрофлюидных приложениях, а также может использоваться для автоматизации таких приложений. Об этом ученые сообщили в Nature Communications.
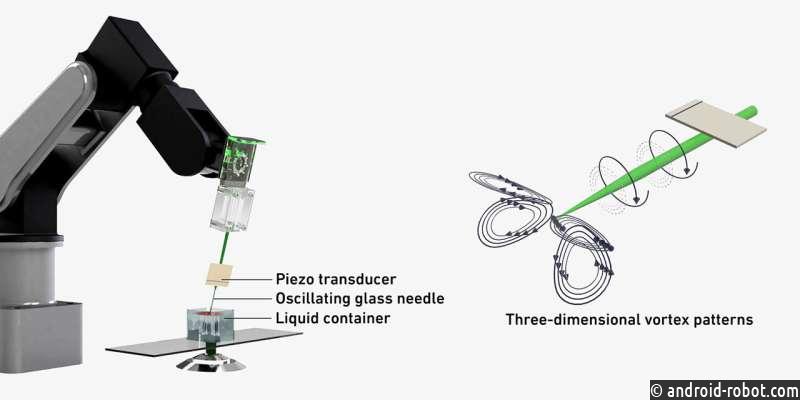
Устройство состоит из тонкой заостренной стеклянной иглы и пьезоэлектрического преобразователя , который заставляет иглу колебаться. Подобные преобразователи используются в громкоговорителях, ультразвуковой визуализации и профессиональном оборудовании для чистки зубов. Исследователи ETH могут изменять частоту колебаний своей стеклянной иглы. Погружая иглу в жидкость, они создают трехмерный рисунок, состоящий из множества вихрей. Поскольку эта картина зависит от частоты колебаний, ею можно управлять соответствующим образом.
Исследователи смогли использовать это, чтобы продемонстрировать несколько приложений. Во-первых, они смогли смешать крошечные капельки высоковязких жидкостей. «Чем более вязкие жидкости, тем сложнее их смешать», — объясняет профессор Ахмед. «Однако наш метод преуспевает в этом, потому что он позволяет нам не только создавать одиночный вихрь, но и эффективно смешивать жидкости, используя сложную трехмерную структуру, состоящую из нескольких сильных вихрей».
Во-вторых, ученые смогли прокачивать жидкости через систему мини-каналов, создав определенный узор вихрей и поместив колеблющуюся стеклянную иглу близко к стенке канала.
В-третьих, им удалось использовать роботизированное акустическое устройство для улавливания мелких частиц, присутствующих в жидкости. Это работает, потому что размер частицы определяет ее реакцию на звуковые волны. Относительно крупные частицы движутся к колеблющейся стеклянной игле, где и накапливаются.
Исследователи продемонстрировали, как этот метод может захватывать не только неодушевленные частицы, но и эмбрионы рыб. Они считают, что он также должен быть способен захватывать биологические клетки в жидкости. «Раньше манипулирование микроскопическими частицами в трех измерениях всегда было сложной задачей. Наша рука-микроробот упрощает эту задачу», — говорит Ахмед.
«До сих пор достижения в области крупной традиционной робототехники и микрожидкостных приложений делались отдельно», — говорит Ахмед. «Наша работа помогает объединить два подхода».
В результате будущие микрожидкостные системы могут быть спроектированы аналогично сегодняшним роботизированным системам. Соответствующим образом запрограммированное одно устройство сможет выполнять множество задач.
«Смешивание и перекачивание жидкостей и улавливание частиц — все это мы можем делать с помощью одного устройства», — говорит Ахмед. Это означает, что микрожидкостные чипы завтрашнего дня больше не нужно будет разрабатывать на заказ для каждого конкретного приложения. Затем исследователи хотели бы объединить несколько стеклянных игл, чтобы создать еще более сложные вихревые узоры в жидкостях.
В дополнение к лабораторному анализу Ахмед может предусмотреть другие приложения для микророботов, например, сортировку крошечных объектов. Возможно, руки можно было бы также использовать в биотехнологии как способ введения ДНК в отдельные клетки. В конечном итоге их можно будет использовать в аддитивном производстве и 3D-печати.