Мягкие роботы, которые могут выполнять задачи с высокой эффективностью, точностью и точностью, могут найти множество полезных применений. Например, их можно было бы внедрить в медицинских учреждениях, помогая врачам проводить сложные хирургические процедуры или помогая пожилым и уязвимым пациентам во время реабилитации.
Мягкие роботы более гибкие и могут больше деформироваться. Это может привести к увеличению ловкости (т. е. лучшим навыкам ручного труда при выполнении задач), а также к снижению полезной нагрузки (т. е. способности робота нести груз), поскольку они могут создавать меньшие силы, чем жесткие роботизированные системы.
Исследователи из Национального университета Сингапура и Пекинского университета Цзяотун недавно разработали нового мягкого робота с приводом от стержня (RDSR), который работает за счет толкающих и тянущих движений. Этот робот, представленный в статье, опубликованной в IEEE Robotics and Automation Letters, сочетает в себе механизмы двух роботизированных систем, ранее созданных членами исследовательской группы.
«Хорошо сбалансированная производительность с точки зрения ловкости, точности и полезной нагрузки может иметь большой потенциал в приложениях для мягких роботов», — сказала TechXplore Сесилия Ласки, одна из исследователей, проводивших исследование. «Многие исследования сосредоточены на этой области, и несколько работ и предыдущих достижений вдохновили нас. Например, в новаторском исследовании, опубликованном в Materials Science and Engineering, мы разработали мягкого робота, вдохновленного осьминогом, который приводится в движение продольными и поперечными сухожилиями, аналогичным образом».
Предыдущий робот, созданный Ласки и ее коллегами из Института биоробототехники Scuola Superiore Sant’Anna в Италии, может подражать тому, как движется осьминог, удлиняя, укорачивая и сгибая свои щупальца. Их недавно разработанная система может быть особенно перспективной для выполнения миссий в ограниченном пространстве, таких как очистка или исследование, доступ к глубоким полостям и вмешательство внутрь человеческого тела .
«Вторым исследованием, которое вдохновило нас на нашу недавнюю работу, была разработка моей исследовательской группой непрерывного робота на основе гибких стержней «тяни-толкай», — объяснил Пейи Ван, другой исследователь, участвовавший в исследовании. «Сочетая чистое мягкое тело нашей системы, вдохновленной осьминогом, и управляемую стержнем руку робота Ванга, наш новый робот стремится достичь сбалансированных характеристик в отношении точности движения, рабочего пространства, глубины резкости, жесткости и активной выходной силы».
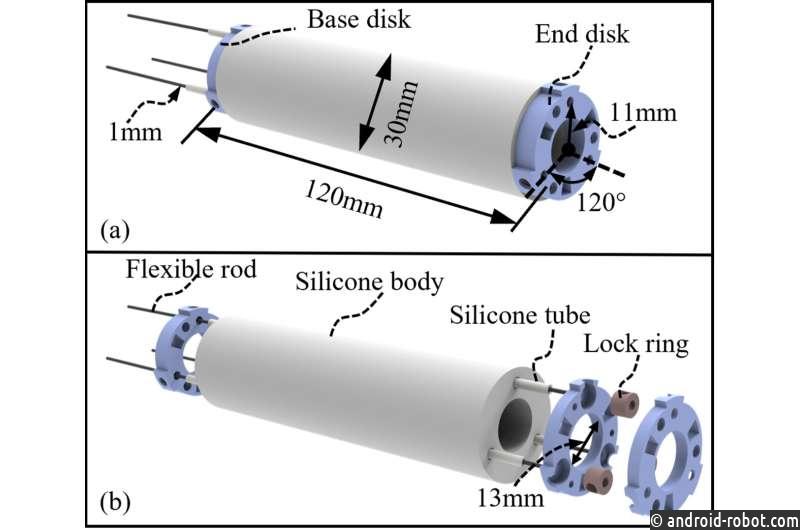
Новый робот, созданный Ласки, Вангом и их коллегами, состоит из мягкого силиконового корпуса, жесткого основания, торцевых дисков и трех силиконовых трубок, в каждой из которых находится гибкий стержень на основе нитинола (NiTi). Силиконовый корпус, встроенный между основанием и торцевым диском, очень мягкий и гибкий, поэтому его можно легко удлинить, укоротить и согнуть.
«Каждый из гибких стержней нашей системы может управляться как в направлении толкания, так и в направлении натяжения, что отличается от сухожилий только с тяговым действием», — сказал Ван. «Мягкий робот с приводом от стержней (RDSR) может затем выполнять несколько движений в любых направлениях (несколько степеней свободы) посредством скоординированного управления тремя тягами».
Исследователи оценили свой RDSR в серии тестов, сравнив его производительность с производительностью мягкого робота на основе силикона (TDSR). Они обнаружили, что их новая роботизированная система стала более жесткой и могла работать в более широком рабочем пространстве (в 2,6–5,2 раза больше).
В отличие от TDSR, они также сравнивали его, их робот мог активно применять толкающие перпендикулярные силы к наклонной плоскости, а также мог выполнять задачи, связанные с манипулированием объектами. В совокупности все эти данные свидетельствуют о том, что новый робот может быть более эффективным при выполнении задач, связанных с захватом и размещением объектов в больших пространствах с высокой точностью.
«Движение, полученное с двунаправленным двухтактным приводом, является оригинальным», — сказал Ласки. «Это дает мягкому роботу более точное управление. Заметным следствием нашей работы является его потенциал для обеспечения сбалансированной производительности с точки зрения ловкости, точности и полезной нагрузки».
В будущем новая система RDSR, созданная этой группой исследователей, может помочь более эффективно и надежно решать сложные задачи, достигая более высокого уровня точности. В своих следующих исследованиях Ласки и ее коллеги хотели бы проверить эффективность роботов для биомедицинских приложений, включая хирургию, реабилитацию и уход за пожилыми людьми.
«Мы также планируем улучшить созданную нами мягкую руку в других аспектах, которые не связаны строго с ее дизайном и механикой, а связаны с контролем ее движений», — добавил Ласки. «Добавление и моделирование распределенной проприоцепции, т. е. восприятия собственного положения руки, является сложной задачей, которую необходимо решить, как и надежная сенсорная система для обнаружения контактных сил».