Самоощущающаяся искусственная мышца на основе жидкокристаллического эластомера и легкоплавких сплавов.
Материаловеды и биоинженеры, работающие на стыке регенеративной медицины и биоматериалов, стремятся разработать программируемые по форме искусственные мышцы с возможностями самоощущения для применения в медицине. В новом отчете, опубликованном в журнале Science Advances , Хаоран Лю и группа исследователей в области инженерии систем и коммуникаций из Пограничного института науки и технологий Университета Цзяотун, Китай, вдохновились парным поведением мышц, костей и нервной системы. млекопитающих и других живых организмов для создания многофункциональной искусственной мышцы в лаборатории. Конструкция содержала жидкокристаллический эластомер, покрытый полидофамином.(LCE) и легкоплавких сплавов (LMPA) в концентрической трубе или стержне. В то время как команда использовала внешний жидкокристаллический эластомер для имитации обратимого сокращения и восстановления, они внедрили внутренний сплав с низкой температурой плавления для блокировки деформации и определения механики сопротивления, очень похожей на функции костей и нервов соответственно. Искусственная мышца продемонстрировала ряд характеристик, включая регулируемое изгибание и деформацию для поддержки тяжелых предметов, и представляет собой прямой и эффективный подход к разработке биомиметических мягких устройств.
Мягкая робототехника, вдохновленная системой скелет-мышцы-нерв
Ученые стремятся реализовать биосовместимость между мягкими роботизированными элементами и людьми для вспомогательного движения и высокой несущей способности; однако такие усилия сложны . Большинство традиционных роботов до сих пор используются в промышленности, сельском хозяйстве и аэрокосмической отрасли для высокоточных сенсорных приложений, несущих нагрузку. Несколько функциональных мягких роботов, напротив, зависят от материалов для повышения безопасности взаимодействия человека с машиной . Таким образом, мягкие роботы дополняют жестких роботов и обладают огромным потенциалом.для приложений. Биомиметические конструкции также послужили альтернативным источником вдохновения для имитации скелетно-мышечно-нервной системы для облегчения маневренных движений и быстрой реакции или мышления, с уникальной формой тела, подходящей для задач и выполняющей разнообразные физиологические функции. В этой работе Лю и соавторы были вдохновлены увлекательной идеей биомимикрии для разработки многофункциональных искусственных мышц для интеллектуальных приложений.
Принцип работы
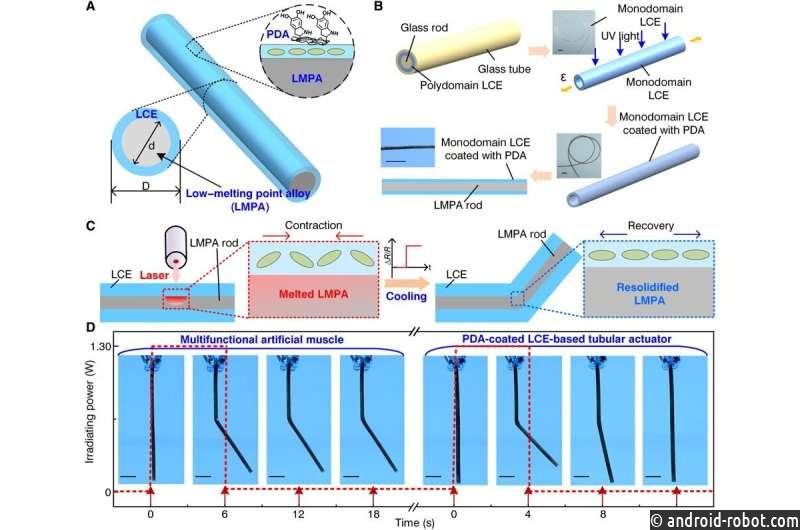
Команда продемонстрировала предложенную многофункциональную мышцу в сочетании с мягкими эластомерами и твердыми сплавами. Лю и др. подготовили жидкокристаллические эластомеры (LCE), используя реакции присоединения Михаэля с аминами и тиолами, и создали слабо сшитую полую эластомерную трубку посредством гелеобразования в стеклянной трубке или стержне. Исследователи представили фототермический эффект, разработав слой полидофамина на поверхности материала, чтобы сохранить превосходную фотостабильность и сильные характеристики поглощения в ближнем инфракрасном диапазоне .. Команда показала, как можно разработать многофункциональные искусственные мышцы путем встраивания предварительно изготовленных сплавов с низкой температурой плавления (LMPA) в трубку LCE с полимерным покрытием. Затем они облучали искусственную мышцу сбоку лазером и вызывали мгновенное преобразование света в тепло в этой области. Сравнительный анализ деформации показал мгновенный изгиб примерно через шесть секунд после лазерного облучения, подчеркнув влияние LMPA на превосходные свойства деформации мышц.
Описание многофункциональных искусственных мышц как реконфигурируемой антенны
Лю и др. выполнили анализ методом конечных элементов с помощью программного обеспечения ABAQUS и смоделировали источник тепла. Они изучили распределение температуры и напряжения искусственной мышцы при различных мощностях облучения. В то время как большие мощности облучения вызывали большое напряжение в эластомере, это дополнительно вызывало большой угол изгиба в области сплава искусственной мышцы. Команда проанализировала угол изгиба многофункциональной искусственной мышцы, зависящий от мощности лазера, площади пятна и времени облучения, используя экспериментальные тесты и моделирование. Они показали, как регулировать гибкую деформацию по углу изгиба, направлению и положению, чтобы увеличить возможность формирования программируемой по форме искусственной мышцы.
Команда охарактеризовала быстрое преобразование формы и характеристики фиксации деформации искусственной мышцы с помощью ряда экспериментов, включая циклические тесты, чтобы продемонстрировать ее способность к деформации. Они также охарактеризовали сенсорные функции для мониторинга динамического поведения искусственных мышц в режиме реального времени на основе изменений электрического сопротивления. Лю и др. В дальнейшем использовали свойства нескольких материалов и продемонстрировали применение предложенных многофункциональных искусственных материалов в качестве реконфигурируемой антенны. В этом случае они измерили угол изгиба, нанеся лазер на поверхность искусственной мышцы, чтобы он функционировал как дистанционно управляемая реконфигурируемая антенна.
Перспектива
Таким образом, Хаоран Лю и его коллеги разработали искусственную мышцу с программируемой формой, блокировкой деформации и самочувствием, основанную на поведенческих характеристиках живых костей, мышц и нервов, с использованием мягких эластомерных материалов в сочетании с материалами из сплава высокой жесткости. Жесткий сплав с низкой температурой плавления (LMPA) имитировал эндоскелеты живых организмов для обеспечения структурной прочности, в то время как чистые мягкие материалы, изготовленные из жидкокристаллического эластомера (LCE), обеспечивали мощное исполнительное усилие и надежную физическую совместимость для имитации естественных мышц. Исследование предоставило первый пример для формирования искусственной мышцы с вышеупомянутыми характеристиками, где конструкции продемонстрировали быстрое преобразование формы и свойства деформации, чтобы получить экспериментальные руки робота с приложениями на тактильных дисплеях.