Представлена платформа, позволяющая роботизированному захвату с сенсорным управлением с использованием тактильных датчиков.
Чтобы успешно сотрудничать с людьми при выполнении ручных задач, роботы должны уметь хватать и манипулировать различными объектами, не роняя и не повреждая их. Таким образом, недавние исследования в области робототехники были сосредоточены на разработке тактильных датчиков и контроллеров, которые могли бы дать роботам чувство осязания и приблизить их возможности манипулирования объектами к возможностям людей.
Исследователи из группы Dexterous Robotics Бристольской лаборатории робототехники (BRL), Пизанского университета и IIT недавно разработали тактильно-управляемую систему, которая может позволить роботам бережно и более эффективно захватывать различные объекты. Эта система, представленная в статье, предварительно опубликованной на arXiv , сочетает в себе схему управления, которая обеспечивает чувствительное к силе прикосновение с роботизированной рукой с оптическим тактильным датчиком на каждом кончике пальца.
«Мотивация этой работы проистекает из сотрудничества между группой ловкой робототехники в BRL и исследователями из Пизанского университета и IIT», — сказал Tech Xplore Крис Форд, один из исследователей, разработавших тактильную систему. «У Pisa/IIT есть уникальная конструкция руки робота ( SoftHand ), которая основана на человеческой руке. Мы хотели объединить Pisa/IIT SoftHand и тактильный датчик BRL TacTip, поскольку две технологии дополняют друг друга благодаря их биомиметическая природа».
SoftHand — это роботизированная рука, напоминающая человеческие руки как по форме, так и по функциям. Первоначально разработанная как протез, эта рука может хватать с той же постуральной синергией, что и человеческие руки.
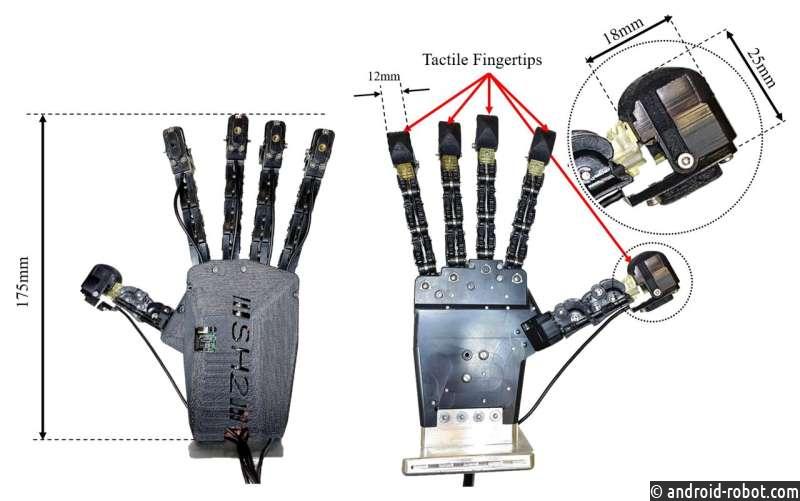
Для целей своего исследования Форд и его коллеги интегрировали по одному оптическому тактильному датчику на каждый кончик пальца SoftHand. Они использовали датчик под названием TacTip, который может извлекать информацию из напечатанной на 3D-принтере тактильной кожи с внутренней структурой, напоминающей структуру кожи человека.
«Мы считаем, что сочетание этих черт является ключом к человеческой ловкости и манипулятивным возможностям роботов», — сказал Форд. «Впервые мы исследовали эту возможность в статье, опубликованной в 2021 году , в которой датчик кончика пальца был интегрирован в один палец Pisa/IIT SoftHand и протестирован. Естественным продолжением этой работы стала интеграция датчиков во все пальцы и установка руки на палец. роботизированная рука для выполнения некоторых задач по захвату и манипулированию, используя тактильную информацию от кончиков пальцев в качестве сенсорной обратной связи».
Основная цель недавней работы Форда и его коллег заключалась в дальнейшем изучении потенциала системы на основе SoftHand, представленной в их предыдущей работе, но с добавлением сенсоров TacTip на кончиках пальцев. Интегрируя эту обновленную версию своей системы с усовершенствованной структурой управления, они надеялись воспроизвести человеческое, чувствительное к силе и мягкое хватание.
Новый контроллер, представленный в их работе, измеряет деформацию мягкой тактильной кожи на каждом из кончиков пальцев SoftHand. Эта деформация служит сигналом обратной связи, который контроллер использует для регулировки силы, прилагаемой рукой к объекту, который она захватывает.
«Это уникально по сравнению с более традиционными методами управления захватом, такими как управление током двигателя, которые могут быть неточными при применении к захватам с «мягкой» структурой, таким как SoftHand», — пояснил Форд. «Еще одна уникальная особенность контроллера заключается в том, что он использует обратную связь от 5 оптических тактильных датчиков высокого разрешения. Оптические тактильные датчики используют камеру для отслеживания изменений тактильных ощущений на коже и являются полезными из-за большого объема тактильной информации, которую они фиксируют благодаря своим свойствам. более высокое разрешение, поскольку каждый пиксель изображения представляет собой узел, содержащий тактильную информацию. Для тактильного изображения с разрешением 1080p это означает более 2 миллионов тактильных узлов».
Использование нескольких оптических датчиков одновременно обычно требует больших вычислительных мощностей, поскольку одному компьютеру необходимо одновременно захватывать изображения с высоким разрешением с разных камер для сбора тактильной информации с разумной скоростью. Чтобы уменьшить вычислительную нагрузку, связанную с их системой, Форд и его коллеги разработали аппаратный «мозг» с параллельной обработкой, который может одновременно собирать изображения с нескольких датчиков. Это значительно улучшило время реакции их контроллера хватки, позволив ему достичь характеристик, подобных человеческим.
«Результаты этой работы показывают, что мы можем получать сложную тактильную информацию с точностью, близкой к человеческому прикосновению, от нескольких кончиков пальцев, и объединять ее в простой сигнал обратной связи, который можно использовать для успешного применения устойчивых, нежных захватов к широкому кругу объектов независимо от того, геометрии и жесткости без необходимости сложной настройки», — сказал Форд. «Еще одним достижением является разработка аппаратного «мозга», используемого для захвата и обработки тактильных данных с нескольких датчиков высокого разрешения одновременно».
Интеграция нескольких датчиков значительно улучшила тактильные и сенсорные возможности роботизированной системы исследователей на основе SoftHand. Объединив его с аппаратным обеспечением для параллельной обработки и сложным контроллером, команда также улучшила свою способность захватывать различные типы объектов подходящим образом и без нежелательных задержек, связанных с обработкой данных датчиков.
«Мы хотим захватить как можно больше тактильной информации , поэтому данные должны быть захвачены с как можно более высоким разрешением, однако это быстро становится трудоемким, особенно когда вы начинаете внедрять в систему несколько датчиков», — сказал Форд. «Наличие масштабируемого аппаратного решения, которое позволяет нам решать эту проблему, очень полезно при использовании оптических тактильных датчиков на руках с несколькими пальцами».
В будущем новая роботизированная система с тактильным приводом, созданная этой группой исследователей, может быть интегрирована в роботов-гуманоидов, что позволит им обращаться с хрупкими или деформируемыми объектами, сотрудничая с людьми при выполнении различных задач. Хотя Форд и его коллеги до сих пор тестировали свою систему в основном на задачах, требующих осторожного захвата объектов, вскоре ее можно будет применять и к другим сценариям захвата и манипулирования.
«Разрешение тактильных данных, которые мы можем получить с этих датчиков, приближается к тактильному разрешению человека, поэтому мы считаем, что из тактильных изображений мы можем извлечь гораздо больше информации, что позволит выполнять более сложные задачи манипуляции», — добавил Форд.
«Следовательно, в настоящее время мы разрабатываем несколько более сложных методов для определения общей силы захвата и более точного понимания природы контакта на каждом кончике пальца. Мы надеемся, что максимизация потенциала этих датчиков в их интеграция с антропоморфными руками приведет к созданию роботов с ловкими способностями, сравнимыми с человеческими».