Достижения в области робототехники подпитываются исследованиями, которые в свою очередь в значительной степени опираются на эффективные платформы для тестирования алгоритмов управления и навигации роботов. Хотя за последние десятилетия было разработано множество робототехнических платформ, большинство из них имеют недостатки, которые ограничивают их использование в исследовательских целях.
Исследователи из Калифорнийского университета (UC) в Беркли недавно разработали Berkeley Humanoid , новую роботизированную платформу, которая может использоваться для обучения и тестирования алгоритмов управления гуманоидными роботами. Этот новый гуманоидный робот , представленный в статье , размещенной на сервере препринтов arXiv , решает и преодолевает некоторые ограничения ранее представленных исследовательских платформ робототехники.
«Проведя несколько экспериментов с коммерчески доступными роботами, мы узнали о некоторых их слабостях», — рассказал Tech Xplore соавтор статьи Цяюань Ляо. «Например, часть оборудования роботов очень дорогая, в то время как другое оборудование не предназначено специально для управления на основе обучения или для исследований, что часто означает, что оно «хрупкое», его легко сломать и трудно обслуживать и ремонтировать».
Основная цель недавней работы Ляо и его коллег заключалась в разработке более экономически эффективных и масштабируемых платформ для исследований в области робототехники. Эти платформы должны быть недорогими, простыми для исследователей в изготовлении и экспериментировании, устойчивыми к отказам, простыми в переноске, требующими минимального обслуживания и должны управляться одним оператором.
«Разработанная нами платформа, робот-гуманоид из Беркли, обладает высокой производительностью, прозрачными низкоуровневыми приводами и трансмиссией, более высокой надежностью и стоит недорого», — пояснил Ляо. Мы достигаем этого, проектируя и строя все с нуля, включая как механические, так и электрические компоненты».
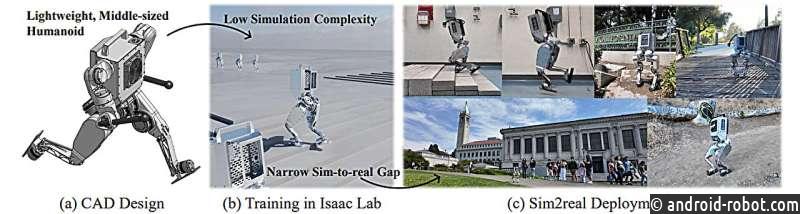
Berkeley Humanoid — это компактный, недорогой и легкий робот, который может быть легко развернут в лабораториях робототехники. Его индивидуальные механические компоненты включают коробку передач и приводы, а также различные конечности и части тела. С другой стороны, его электрические компоненты — это привод двигателя и модуль инерциального измерительного блока (IMU).
Исследователи протестировали свою роботизированную платформу в серии тестов и продемонстрировали, что она может эффективно решать различные задачи по локомоции, даже если она контролируется базовой политикой на основе обучения. С этой простой политикой робот был способен ходить по разным ландшафтам, прыгать на одной и двух ногах и проходить большие расстояния как по городским, так и по грунтовым дорогам.
«Мы представили новую высокопроизводительную , надежную, недорогую платформу для исследований гуманоидов и продемонстрировали удивительные задачи по локомоции с простой политикой обучения», — сказал Ляо. «Гуманоид из Беркли разработан специально для академических исследований, а не для прямого внедрения в промышленность. Мы хотим ускорить разработку алгоритмов и экспериментальную проверку».
Первоначальные испытания подчеркнули значительный потенциал Berkeley Humanoid, показав, что он может поддерживать динамическую ходьбу с различными стилями локомоции, сохраняя при этом устойчивость на различных типах местности. Платформа вскоре может быть использована как в Беркли, так и в других исследовательских лабораториях робототехники для обучения и тестирования новых алгоритмов управления и навигации роботов.
«Теперь мы надеемся добавить руки к нашему роботу, чтобы робот мог проводить исследования, связанные с манипуляциями», — добавил Ляо. «В рамках наших следующих исследований мы также надеемся добавить возможности восприятия с использованием камеры, чтобы обеспечить еще лучшую производительность».