Шестиподный робот ALLOMAN — это новая многофункциональная платформа с интеграцией ноги и руки.
Исследовательская группа из Института робототехники Бейханского университета, Китай, разработала новый многофункциональный шестиногий робот с интеграцией ноги и руки, названный ALLOMAN (движение и манипулирование рукой и ногой). Этот робот обладает различными «фиксированными» манипулятивными функциями, помимо передвижения, и исследователи успешно добились мобильной манипулятивной функции на этом роботе, что сложно для роботов с ногами. Их исследование можно найти в журнале Frontiers of Machine Engineering от 8 апреля 2022 года.
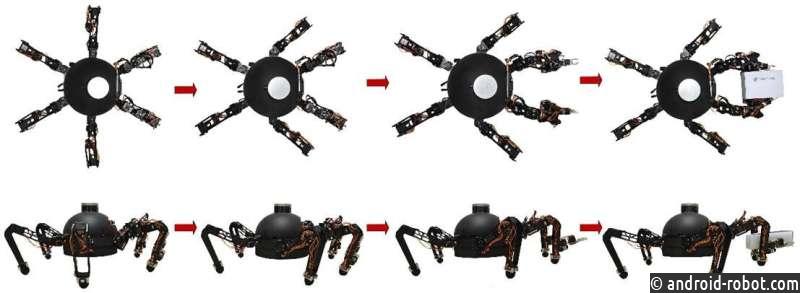
С широким применением ножных роботов в различных областях растет спрос на роботов с гибкими манипуляционными возможностями. Поскольку выполнение манипуляций для большинства роботов на ногах требует добавления дополнительной руки, эта конструкция может привести к неблагоприятным характеристикам, таким как высокая стоимость, низкая эффективность и плохая гибкость. Следовательно, исследовательская группа предлагает новую конструкцию конечности, основанную на «механизме конечностей», который оснащен различными рабочими органами для улучшения рабочих характеристик робота. Робот-гексапод выполняет функцию скоординированного зажима, а кроме того, могут быть реализованы функции зажима, сдвига и скоординированного сдвига.
Помимо передвиженияи «фиксированное» манипулирование, мобильное манипулирование (манипулирование во время движения, а не манипулирование после движения) является ценной темой исследования, которая может улучшить гибкость движения робота на ногах. «Манипулирование во время движения — это эффективный способ для животного повысить эффективность и выиграть время. Для нового робота-гексапода, представленного в этом исследовании, благодаря механизму интеграции ног и рук и высокой отказоустойчивости конечностей робот, очевидно, может достичь функция мобильного манипулирования», — сказал доцент Кун Сюй, автор исследования. Исследовательская группа проф. Xilun Ding и Kun Xu — одна из первых исследовательских групп, изучающих интеллектуальных роботов на ногах в Китае. Эта исследовательская группа занимается смежными исследованиями уже более 20 лет. и реализовал множество теоретических исследований и прикладных достижений. Лаборатория многорежимных мобильных роботов-манипуляторов, принадлежащая группе, обладает сильной технологической базой и преимуществом в дисциплине.
«Робот ALLOMAN hexapod в настоящее время является экспериментальным прототипом, и он все еще далек от совершенства. Далее мы сосредоточимся на улучшении разработки прототипа и реализации дополнительных функций манипулирования. Эта работа продвигается шаг за шагом и будет применяться во многих областях, которые остро нуждаются в многофункциональных платформах, таких как городская безопасность, антитеррористические манипуляции и исследование планет в ближайшем будущем», — сказал Дин.