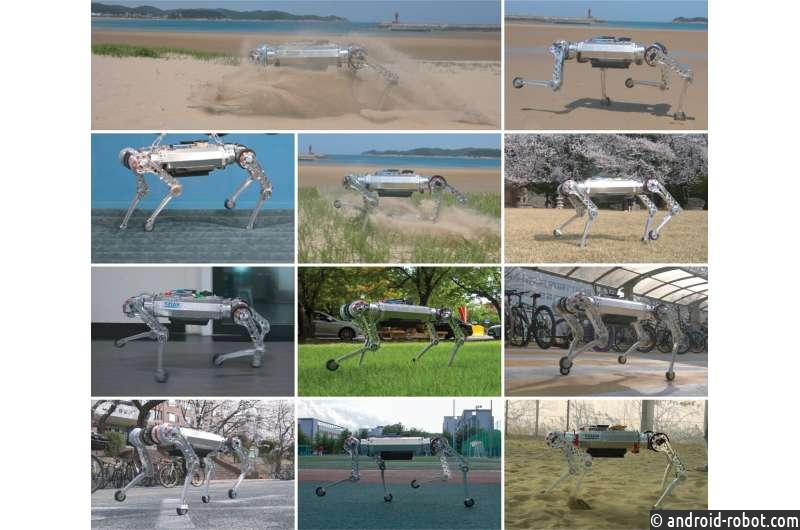
RaiBo: универсальный робот-пес, который бегает по песчаному пляжу со скоростью 3 метра в секунду.
Исследовательская группа под руководством профессора Хвангбо Джемина из факультета машиностроения KAIST разработала технологию управления четвероногим роботом, который может уверенно и ловко передвигаться даже по деформируемой местности, такой как песчаный пляж.
Исследовательская группа профессора Хвангбо разработала технологию моделирования силы, воспринимаемой шагающим роботом на земле из зернистых материалов, таких как песок, и смоделировала ее с помощью четвероногого робота. Кроме того, команда работала над структурой искусственной нейронной сети, которая была способна принимать решения в реальном времени, чтобы адаптироваться к различным типам поверхности земли без предварительной информации во время ходьбы, и применила ее к обучению с подкреплением.
Ожидается, что обученный нейросетевой контроллер расширит область применения четвероногих шагающих роботов, доказав свою устойчивость к меняющейся местности, в том числе способность двигаться с высокой скоростью даже по песчаному пляжу, а также ходить и поворачиваться на мягком грунте, как на надувном матрасе, не теряя баланс.
Это исследование с докторской степенью. Студент Soo-Young Choi с факультета машиностроения KAIST в качестве первого автора опубликовал в январе в журнале Science Robotics статью под названием «Изучение передвижения на четвероногих по деформируемой местности».
Обучение с подкреплением — это метод обучения ИИ, используемый для создания машины, которая собирает данные о результатах различных действий в произвольной ситуации и использует этот набор данных для выполнения задачи. Поскольку объем данных, необходимых для обучения с подкреплением , очень велик, широко используется метод сбора данных с помощью моделирования, который аппроксимирует физические явления в реальной среде.
В частности, контроллеры на основе обучения в области шагающих роботов были применены к реальным средам после обучения на основе данных, собранных в ходе моделирования, для успешного выполнения управления ходьбой на различных ландшафтах.
Однако, поскольку производительность контроллера на основе обучения быстро снижается, когда фактическая среда имеет какое-либо несоответствие обученной среде моделирования, важно реализовать среду, подобную реальной, на этапе сбора данных. Следовательно, чтобы создать контроллер на основе обучения, который может поддерживать равновесие в деформирующейся местности, симулятор должен обеспечивать аналогичный контактный опыт.
Исследовательская группа определила модель контакта, которая предсказала силу, создаваемую при контакте, исходя из динамики движения идущего тела, на основе модели силы реакции земли, в которой учитывался эффект дополнительной массы зернистой среды, определенный в предыдущих исследованиях.
Кроме того, путем расчета силы, создаваемой одним или несколькими контактами на каждом временном шаге, эффективно моделировалась деформирующаяся местность.
Исследовательская группа также представила структуру искусственной нейронной сети, которая неявным образом предсказывает характеристики грунта с помощью рекуррентной нейронной сети, которая анализирует данные временных рядов с датчиков робота.
Обученный контроллер был установлен на роботе RaiBo, который был построен исследовательской группой для демонстрации высокой скорости ходьбы до 3,03 метра в секунду на песчаном пляже, где ноги робота были полностью погружены в песок. Даже на более твердых грунтах, таких как травянистые поля и беговые дорожки, RaiBo мог работать стабильно, адаптируясь к характеристикам грунта без какого-либо дополнительного программирования или изменения алгоритма управления.
Кроме того, он стабильно вращался со скоростью 1,54 рад/с (примерно 90° в секунду) на надувном матрасе и демонстрировал эту быструю приспособляемость даже в ситуации, когда местность внезапно становилась мягкой.
Исследовательская группа продемонстрировала важность обеспечения подходящего контакта во время процесса обучения по сравнению с контроллером, который предполагал, что земля является жесткой, и доказала, что предложенная рекуррентная нейронная сеть изменяет метод ходьбы контроллера в соответствии со свойствами земли.
Ожидается, что методология моделирования и обучения, разработанная исследовательской группой, будет способствовать выполнению роботами практических задач, поскольку она расширяет диапазон ландшафтов, на которых могут работать различные шагающие роботы.
Первый автор Suyoung Choi сказал: «Было показано, что предоставление основанного на обучении контроллера с тесным контактом с реальным деформирующимся грунтом имеет важное значение для применения к деформирующейся местности». Далее он добавил, что «предложенный контроллер можно использовать без предварительной информации о местности , поэтому его можно применять для различных исследований ходьбы роботов».




