Носимая робототехника обещает помочь пожилым людям сохранить свою мобильность, а пациентам с параличом нижних конечностей восстановить свою. Они могли бы помочь сделать людей сильнее и быстрее. Но пока что они не очень хорошо удерживают людей от падения.
Человеческий баланс — это сложный танец, и даже самые продвинутые роботы и носимые устройства, такие как роботизированные экзоскелеты, с трудом воспроизводят то, как наш мозг и тело работают вместе, чтобы удерживать нас в вертикальном положении. Новое исследование ученых из Технологического института Джорджии и Университета Эмори делает первый шаг к решению проблемы баланса.
В статье, опубликованной 15 февраля в журнале Science Robotics , группа показала, что экзоскелет лодыжки должен реагировать быстрее, чем наши тела, чтобы улучшить баланс. Участники не восстанавливались быстрее, когда экзоскелет откладывал подачу энергии до тех пор, пока не активизировались мышцы ноги и лодыжки для восстановления равновесия.
«Удивительно, что использование физиологически отсроченной помощи экзоскелетов вообще не помогло», — сказал Макс Шепард, научный сотрудник Технологического института Джорджии во время исследования, а ныне доцент Северо-восточного университета. «Я был удивлен результатами — приятно удивлен. Я думаю, что это очень впечатляющий результат».
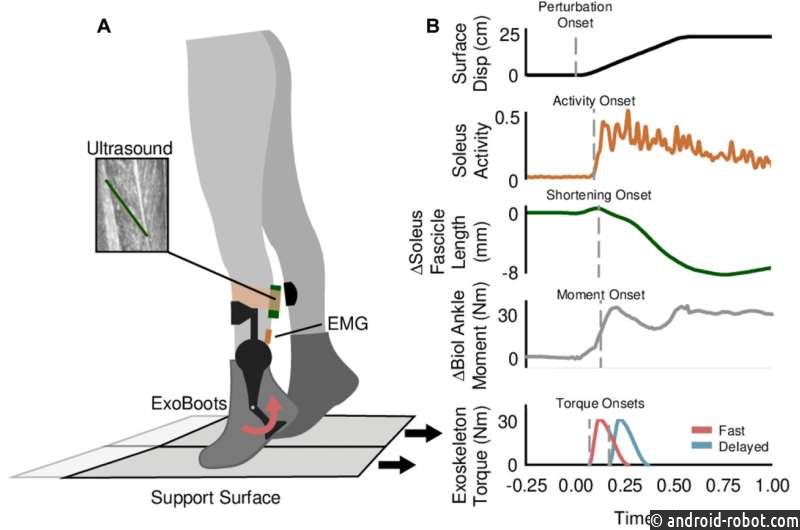
Для исследования команда использовала пару имеющихся в продаже экзоскелетных ботинок от Dephy Inc. Участники надели ботинки и встали на специальную платформу в лаборатории нейромеханики Лены Тинг в Университете Эмори.
Исследователи резко сместили платформу — то, что они называют возмущением, — в результате чего испытуемые теряли равновесие и восстанавливались. Они проверили три условия: отсутствие помощи экзоскелета, помощь с задержкой, чтобы она совпадала с естественной реакцией организма, и помощь быстрее, чем физиологическая реакция . Они сообщили, что передача крутящего момента экзоскелета голеностопного сустава до естественной реакции тела позволила испытуемым выдерживать на 9% большие возмущения, не делая ни шага; задержка крутящего момента не показала никаких улучшений.
«Многие протезы или экзоскелеты управляются физиологическими сигналами, исходящими от человека, который их носит, либо их мышечной активностью , либо активностью их мозга», — сказал Тинг, профессор и почетный председатель Фонда МакКэмиша в Департаменте биомедицинской инженерии Уоллеса Х. Коултера в Джорджии. Технологии и Эмори. «Вы измеряете мышцу вокруг лодыжки, и всякий раз, когда это происходит, вы включаете экзо. Подразумевается, что это не сработает для баланса».
Как выразился соавтор исследования Грег Савицки, полученные данные «немного переворачивают повествование» для подобных роботизированных инструментов.
«Преобладающий подход к управлению состоит в том, чтобы украсть реакцию человека, а затем просто наложить на нее слой. В этом исследовании мы показываем, что этого определенно недостаточно, по крайней мере, для поддержания равновесия», — сказал Савицки, доцент Университета Джорджа. Школа машиностроения В. Вудраффа и Школа биологических наук.
Шепард сказал, что невозможность просто следить за собственными реакциями тела на активацию экзоскелета затрудняет создание устройства, которое могло бы помочь людям восстановить равновесие в реальных ситуациях. Но он также открывает перед исследователями интересные возможности, включая использование подходов машинного обучения для обнаружения возмущений и реагирования на них.
Телу требуется всего 150 миллисекунд или около того, чтобы отреагировать на потерю равновесия, поэтому у экзоскелетов лодыжки было чрезвычайно мало времени для активации, если они должны были превзойти физиологическую реакцию. В своих экспериментах команда использовала акселерометры, подобные тем, что есть в смартфонах, чтобы отслеживать ускорение стопы во время возмущения и запускать активацию экзоботинок.
Более умный контроллер, дополненный некоторой формой машинного обучения, в конечном итоге может оказаться многообещающим. Но, что интересно, данные для этих алгоритмов, скорее всего, должны поступать далеко за пределы лодыжки.
Исследователи сообщили, что искусственная быстрая помощь экзоскелета нарушила начальное движение лодыжки, даже несмотря на то, что мышечная активность была постоянной независимо от того, активировались ботинки или нет. На самом деле локальный сигнал на лодыжке заставлял экзоскелет создавать крутящий момент в неправильном направлении, что было бы еще более дестабилизирующим.
Команда заявила, что это подтверждает идею о том, что мышцы управляются не только локальной сенсорной информацией на лодыжке, но и информацией со всего тела.
Тинг сказал, что исследования, проведенные почти 50 лет назад, показали, что глобальные физиологические сигналы лучше предсказывают поведение тела, направленное на коррекцию баланса, чем локальная информация только от лодыжки и ноги. Но эти исследования не были проверены таким образом.
«Идея состоит в том, что ваш центр масс, который в основном представляет собой чистое движение всего вашего тела, управляет тем, что нужно мышце лодыжки», — сказал Тинг, который также является профессором кафедры реабилитационной медицины в Эмори. «Что мне нравится в наших выводах, так это то, что они модернизируют эту историю 1970-х годов и показывают ее в очень ясных и применимых терминах. И мне понравилось, что этот экзо теперь потенциально является экспериментальным устройством для нашей лаборатории, чтобы фактически продемонстрировать, какой сигнал использовать, когда локальный сигнал конфликтует с глобальным сигналом».
Помимо Тинга, Савицки и Шеперда, среди авторов исследования также были Оуэн Бек, научный сотрудник лаборатории Савицки, а ныне доцент Техасского университета в Остине; инженер-исследователь Эмори Риш Растоги; и постдока Джованни Мартино, который вскоре станет доцентом Падуанского университета в Италии.
«Одна вещь, которая действительно особенная, заключается в том, что мы смогли задать очень конкретный вопрос о взаимодействии между экзоскелетом и человеком и немного больше понять о том, как экзоскелет либо помогает, либо нарушает физиологические реакции человека», — сказал Шеперд . «Это исследование — очень чистый способ дать представление об улучшении баланса, который может стать очень, очень большим подполем в экзоскелетах».
Чтобы завершить свое понимание, команда использовала технологию захвата движения и подключила участников к электромиографии (ЭМГ) и ультразвуковым датчикам, чтобы они могли подробно отслеживать не только то, как лодыжка и экзо-сапоги работают вместе или друг с другом, но и то, как мышцы напряглись и насколько сильно.
«Это больше, чем просто взрывать людей с помощью роботов и смотреть, что происходит. Мы также объясняем, почему и что происходит под кожей», — сказал Савицки. «Это важный шаг вперед для инженерного проектирования. Это также сигнал о том, что вам нужно иметь несколько физиологов в ваших лабораториях робототехники, и вам нужно иметь несколько инженеров в ваших физиологических лабораториях».