Группа исследователей из Института интеллектуальных систем им. Макса Планка совместно с парой коллег из Харбинского технологического института разработала крошечную коробку передач с приводом, которую можно использовать для увеличения мощности очень крошечных роботов. В своей статье, опубликованной в журнале Science Robotics, группа описывает, как работает их коробка передач, и улучшения мощности, наблюдаемые у нескольких типов крошечных роботов.
В течение последних нескольких лет ученые работали над созданием крошечных роботов, которых можно было бы вводить в тело человека для проведения медицинских процедур. Есть надежда, что таких роботов можно будет отправить, например, на поиск и уничтожение раковых опухолей . Такие крошечные роботы слишком малы, чтобы нести собственную силовую установку; таким образом, ими необходимо управлять с помощью внешнего магнитного поля. К сожалению, по мере того, как роботы становятся все меньше, их мощность уменьшается, поскольку у них слишком мало массы. В этой новой работе исследователи нашли способ увеличить мощность крошечных роботов с помощью крошечной коробки передач, которая помогает им стать сильнее.
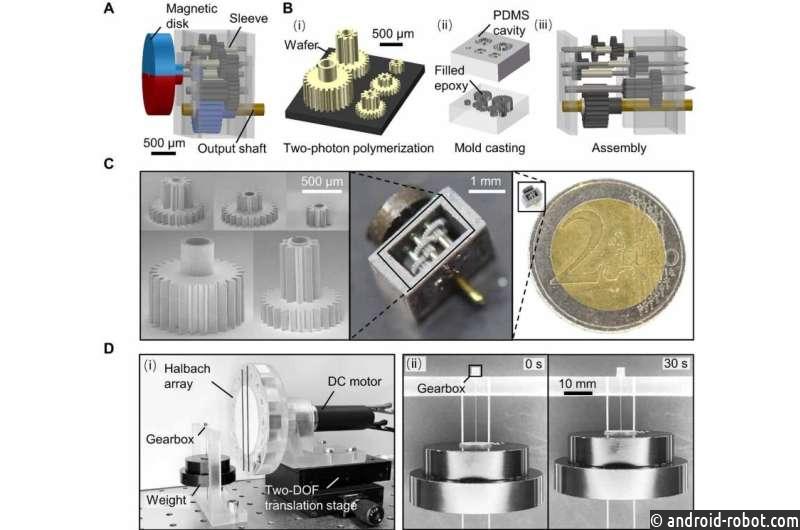
Редуктор поставляется с магнитом на конце, чтобы использовать мощность магнитного поля через шестерни в коробке. А коробка передач способна увеличить мощность робота , используя продуманные функции, в том числе эластичные компоненты и механические связи.
Чтобы использовать коробку передач, крошечные роботы должны быть сконструированы таким образом, чтобы использовать их преимущества. Например, комбинируя эластичные компоненты с механическими связями, пружинообразная энергия может создавать давление, а затем высвобождать его сразу. Механические связи служат для удержания упругих компонентов на месте до тех пор, пока не придет время высвободить энергию.
Чтобы проверить свою идею, исследователи построили коробчатые конструкции с эластичными стенками, которые медленно сжимались коробкой передач, когда на нее воздействовало магнитное поле. Механическая связь удерживала стены на месте, позволяя нарастать давлению. Когда достигалось определенное давление, стены освобождались, толкая робота в нужном направлении. Чтобы создать робота, несколько коробчатых конструкций соединили вместе. Используя этот подход, исследователи смогли создать роботов лебедочного типа, способных поднимать до 103 граммов, или прыгунов, достигающих 119 миллиметров. Они также создали гусеницы и фиксаторы.