Одновременная локализация и картографирование (SLAM) — многообещающая технология, которую можно использовать для улучшения навигации автономных систем, помогая им картографировать окружающую среду и отслеживать другие объекты в ней. До сих пор он в основном применялся к наземным транспортным средствам и мобильным роботам, но потенциально может быть распространен и на космические корабли.
Исследователи из Технологического института Джорджии (Georgia Tech) и Центра космических полетов имени Годдарда НАСА недавно создали AstroSLAM, основанный на SLAM алгоритм, который может позволить космическим кораблям перемещаться более автономно. Новое решение, представленное в статье, предварительно опубликованной на arXiv , может быть особенно полезно в тех случаях, когда космические системы перемещаются вокруг небольшого небесного тела, такого как астероид.
«Наша недавняя работа является частью финансируемой НАСА программы ESI (Early-Stage Innovations), целью которой было сделать будущие космические аппараты , предназначенные для миссий в дальнем космосе (например, посещение и исследование астероидов), более автономными», — сказал Панайотис Циотрас, один из Исследователи, проводившие исследование, рассказали TechXplore.
«Эта проблема представляет большой интерес, так как из-за больших расстояний от Земли трудно выполнять необходимые маневры вокруг астероида в режиме реального времени. Вместо этого текущий процесс требует большой команды людей-операторов на земле. передавать изображения, полученные с космического корабля, и анализировать их в автономном режиме для создания цифровых карт местности, что равносильно тщательной хореографии маневров космического корабля».
Обеспечение того, чтобы космические корабли двигались желаемым образом вокруг астероидов, является трудоемкой, утомительной и требующей много времени задачей для людей на Земле. Таким образом, модель, которая может автономно реконструировать форму ближайших астероидов и управлять космическим кораблем с минимальным вмешательством с Земли, была бы невероятно ценной, поскольку она могла бы облегчить и потенциально ускорить миссии в дальний космос.
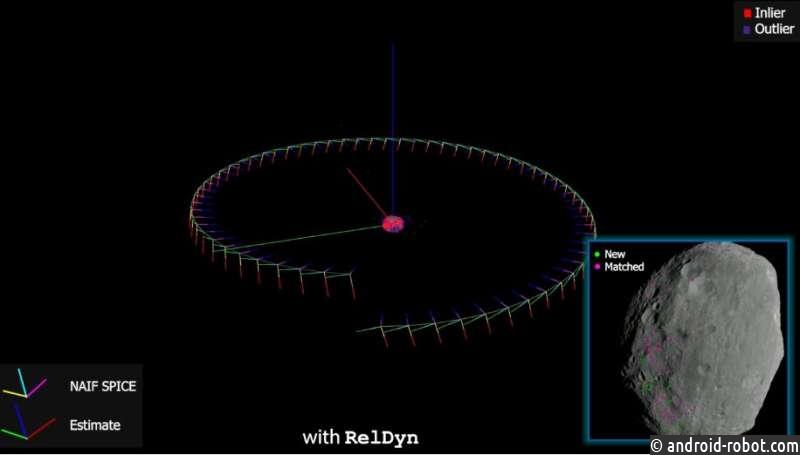
AstroSLAM, решение, разработанное Циотрасом и его коллегами, может автономно генерировать местоположение и ориентацию космического корабля относительно ближайших астероидов или других небольших небесных тел. Это достигается путем анализа последовательности изображений, сделанных камерой на борту космического корабля, когда он вращается вокруг интересующего небесного тела.
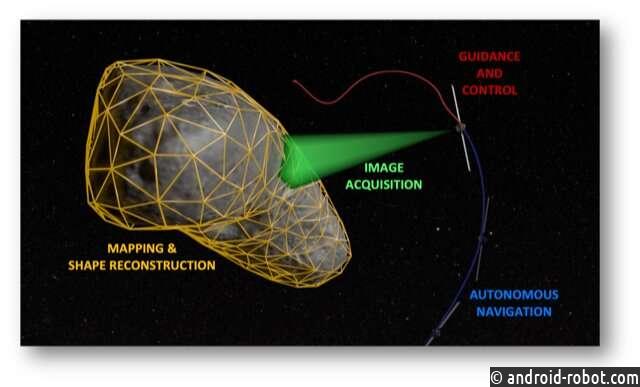
«AstroSLAM, как следует из названия, основан на SLAM, методологии, которая до сих пор с большим успехом использовалась в наземных мобильных роботах, но которую мы не распространяли на космическую среду», — пояснил Циотрас. «Наша модель также может генерировать 3D-представление формы малых небесных тел и оценивать их размер и гравитационные параметры. Алгоритм является кульминацией более чем пятилетней работы в области относительной навигации космических аппаратов на основе зрения в моей группе, Центре динамики и управления. Системная лаборатория Технологического института Джорджии».
AstroSLAM может оценивать относительное положение и ориентацию космического корабля в полной автономности. Затем эту информацию можно использовать для планирования и выполнения различных маневров на орбите, включая посадку на ближайшее небесное тело. Модель также может генерировать трехмерные изображения близлежащего небесного тела, оценивая его размер и гравитационные параметры.
«Одним из нововведений AstroSLAM является то, что он учитывает ограничения движения, связанные с орбитальной динамикой, что обеспечивает гораздо более точное навигационное решение», — сказал Циотрас.
«AstroSLAM снижает зависимость космического корабля от наземного экипажа для выполнения сложных вычислений, тем самым увеличивая его автономность и относительные навигационные возможности. Даже если мы продолжим полагаться на существующие хорошо проверенные методологии в обозримом будущем, предлагаемый подход также может служить «резервное» решение на случай, если основной подход не сработает, поскольку он опирается только на одну камеру».
Исследователи оценили свою технологию в серии тестов, используя реальные данные, полученные НАСА во время предыдущих космических миссий, и высокоточные искусственные данные, созданные с помощью симулятора космического корабля в Технологическом институте Джорджии. Их результаты были очень многообещающими, предполагая, что AstroSLAM может в конечном итоге обеспечить автономную работу космических аппаратов в различных сценариях.
«В настоящее время мы работаем над улучшением этапа обработки изображений AstroSLAM (например, обнаружение и отслеживание характерных особенностей) за счет использования современной архитектуры нейронной сети, обученной на большой базе данных реальных изображений астероидов, полученных ранее НАСА. миссии для обнаружения более надежных, заметных особенностей поверхности», — добавил Циотрас. «Ожидается, что после интеграции с AstroSLAM эта работа повысит надежность и устойчивость к неправильным измерениям (выбросам) и сложным условиям освещения».
Циотрас и его коллеги сейчас также работают над тем, чтобы модель могла объединять изображения видимого света и инфракрасного света, чтобы добиться еще лучших характеристик. Наконец, они хотят расширить свой подход к рабочим сценариям, в которых изображения будут сниматься несколькими космическими аппаратами , находящимися на орбите одновременно.
«Небольшие небесные тела, такие как астероиды, кометы и спутники планет, представляют собой увлекательные и ценные с научной точки зрения цели для исследования», — сказал Кеннет Гетзанданнер, соавтор статьи и руководитель отдела космических научных миссий в NASA Goddard Space. Центр полетов.
«Однако миссии к этим объектам представляют уникальные проблемы для навигации и операций, учитывая небольшой размер объекта и величину возмущающих сил по отношению к гравитации. -REx) на сближающемся с Землей астероиде 101955 Бенну иллюстрируют эти проблемы и требуют обширных кампаний по характеристике и значительного взаимодействия с землей. Такие технологии, как AstroSLAM, полезны для упрощения операций, снижения зависимости от наземных средств и персонала для почти операции в режиме реального времени, а также возможность реализации более амбициозных концепций миссий и ближних вылетов».