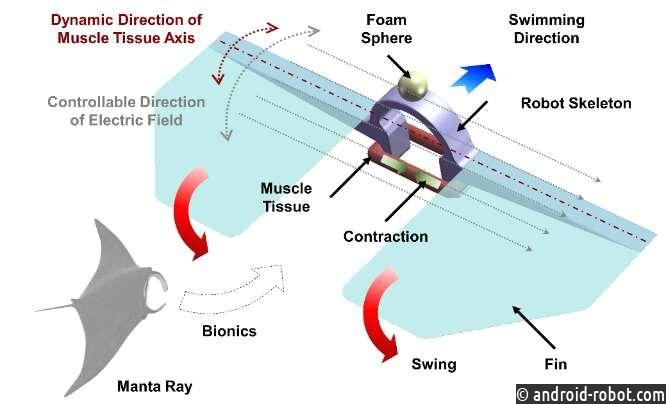
Природа оказала большую поддержку развитию роботов. Вдохновленные скатами манта, группа из Ключевой государственной лаборатории робототехники Шэньянского института автоматизации Китайской академии наук разработала бионического плавательного робота, который приводится в действие культивированной тканью скелетных мышц и управляется круговыми распределенными множественными электродами (CDME). Робот может эффективно приводиться в движение только одной мышечной тканью.
Биомиметика является одним из наиболее важных методов исследования роботов, который может улучшить кинематические характеристики роботов за счет имитации структуры и поведения естественных организмов. Биосинкретический робот , в котором в качестве основного элемента используются природные биологические материалы, является дальнейшим развитием бионики.
Некоторые живые клетки использовались для реализации некоторых функций роботов, включая восприятие, управление и приведение в действие. Однако для дальнейшего развития управляемых характеристик движения биосинкретических роботов необходимы инновационные методы движения и управления. Для решения этой проблемы исследователи предложили метод динамического управления на основе CDME. Исследование было опубликовано в журнале Cyborg and Bionic Systems .
Команда обнаружила, что электрическое поле, создаваемое CDME, менее вредно для культуральной среды и клеток, чем обычные электроды. Используя этот метод, направление электрического поля , генерируемого электродом, можно было динамически контролировать, поддерживая его параллельно движущейся ткани робота в режиме реального времени, тем самым обеспечивая стабильное управление роботом.
Во-первых, команда разработала скелет робота на основе структуры ската манта и использовала полидиметилсилоксан (PDMS) в качестве основного материала для конструкции. В то же время, чтобы облегчить сборку движущей ткани и конструкции робота, исследователи выбрали кольцеобразную ткань, сделанную миобластами, в качестве движущей силы робота.
Кроме того, для получения кольцевых мышечных тканей с эффективной сократимостью использовали вращательную электрическую стимуляцию от CDME для реализации равномерной индукции дифференцировки миобластов в миотубы. Чтобы робот мог плавать с желаемой скоростью, перед сборкой с конструкцией пловца была измерена сократительная способность мышечной ткани. Исследовательская группа также использовала методы моделирования для анализа взаимосвязи между характеристиками движения робота и движущей силой сокращения тканей.
Наконец, чтобы продемонстрировать стабильное и контролируемое движение предлагаемого биосинкретического робота, исследователи реализовали управляемое плавание робота с разными скоростями, используя предложенный метод динамической электрической стимуляции. В ходе эксперимента робот продемонстрировал эффективное плавание и стабильную управляемость, что подтвердило эффективность предложенной исследовательской группой биомиметической конструкции и метода управления на основе КДМЭ.
Предложенный в данном исследовании биомиметический дизайн и метод управления срабатыванием не только способствуют дальнейшему развитию биосинкретических роботов, но и имеют определенное руководящее значение для биомиметического дизайна мягких роботов, инженерии мышечных тканей и других смежных областях.
Однако, несмотря на то, что нынешние биосинкретические роботы достигли эффективного управляемого движения, все еще остается много ключевых узких мест, которые необходимо преодолеть. Например, большинство роботов имеют размер в сантиметры, что сложно для таких приложений, как доставка лекарств в естественных условиях.
Технологии, включая 3D-печать и гибкие манипуляции, ориентированные на микро-нанобиологические структуры, являются ключевыми для разработки биосинкретических микророботов для клинического применения и других особых сред. Кроме того, большинство существующих биосинкретических роботов полагаются на внешние искусственные стимулы для достижения контролируемого движения, которому может не хватать автономии. Таким образом, метод обнаружения и управления на основе живых клеток может быть применен к исследованию биосинкретических роботов с целью реализации автономного движения роботов на основе информации об окружающей среде.