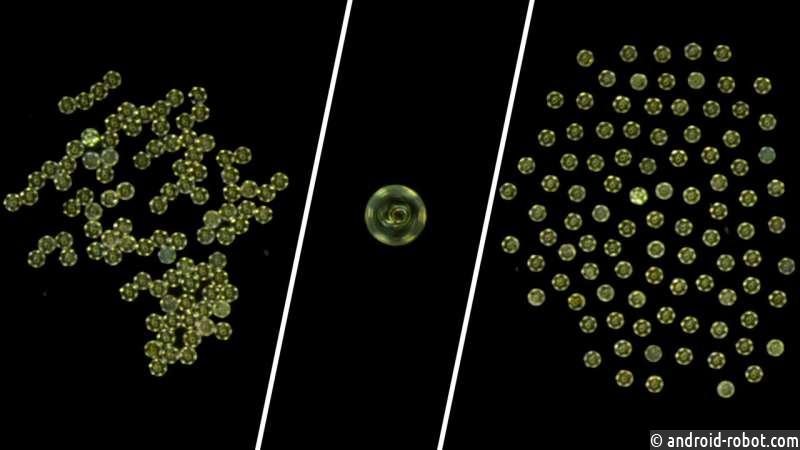
Исследователи из Института интеллектуальных систем Макса Планка (MPI-IS), Корнельского университета и Шанхайского университета Цзяо Тонг разработали коллективы микророботов, которые могут двигаться в любом желаемом направлении. Миниатюрные частицы способны быстро и надежно изменять конфигурацию своего роя. Плавая на поверхности воды, универсальные диски-микророботы могут двигаться по кругу, танцевать буги-вуги, собираться в комок, растекаться, как газ, или образовывать прямую линию, как бусинки на нитке.
Каждый робот немного больше ширины волоса. Они печатаются на 3D-принтере с использованием полимера, а затем покрываются тонким верхним слоем кобальта. Благодаря металлу микророботы становятся миниатюрными магнитами. Между тем, установка окружена проволочными катушками, которые создают магнитное поле, когда через них проходит электричество. Магнитное поле позволяет точно направлять частицы вокруг водоема шириной в один сантиметр. Например, когда они выстраиваются в линию, исследователи могут перемещать роботов таким образом, чтобы они «писали» буквы в воде. Исследовательский проект Гаурава Гарди и профессора Метина Ситти из MPI-IS, Стивена Серона и профессора Кирстин Петерсен из Корнельского университета и профессора Вендонга Вана из Шанхайского университета Цзяо Тонг под названием «Коллективы микророботов с реконфигурируемой морфологией, поведением и функциями».Nature Communications , 26 апреля 2022 г.
Коллективное поведение возникает в результате взаимодействия между роботами.
Коллективное поведение и роевые модели встречаются в природе повсюду. Стая птиц ведет себя как рой, как и косяк рыб. Роботов также можно запрограммировать, чтобы они действовали стаями, и это довольно заметно. Технологическая компания недавно представила световое шоу дронов, которое принесло компании мировой рекорд Гиннеса, запрограммировав несколько сотен дронов и управляя ими бок о бок, создавая удивительные узоры в ночном небе. Каждый дрон в этом рое был оснащен вычислительным усилителем, управляющим им во всех возможных направлениях. Но что, если отдельная частица настолько мала, что вычисление невозможно? Когда ширина робота всего 300 микрометров, его невозможно запрограммировать с помощью алгоритма.
Три разные силы действуют, чтобы компенсировать отсутствие вычислений. Одна из них — магнитная сила .. Два магнита с противоположными полюсами притягиваются. Два одинаковых полюса отталкивают друг друга. Вторая сила — это текучая среда; вода вокруг дисков. Когда частицы плавают в водовороте воды, они вытесняют воду и воздействуют на другие окружающие частицы в системе. Скорость завихрения и его величина определяют, как взаимодействуют частицы. В-третьих, если две частицы плавают рядом друг с другом, они стремятся дрейфовать навстречу друг другу: они изгибают поверхность воды таким образом, что медленно сближаются. Ученые и любители хлопьев называют это эффектом хлопьев: если вы позволите двум хлопьям плавать в молоке, они скоро столкнутся друг с другом. С другой стороны, этот эффект также может привести к тому, что две вещи будут отталкивать друг друга (попробуйте шпильку и хлопья).
Три силы обеспечивают возможность реконфигурации
Ученые используют все три силы для создания скоординированного коллективного движения нескольких десятков микророботов как единой системы. На видео показано, как ученые проводят роботов через паркур, показывая построение, которое лучше всего подходит для полосы препятствий, например, когда они входят в узкий проход, микророботы выстраиваются в один ряд и снова расходятся, когда выходят.
Ученые также могут заставить роботов танцевать в одиночку или парами. Кроме того, они показывают, как они помещают крошечный пластиковый шарик в емкость с водой, а затем объединяют роботов в комок, чтобы толкать плавающий шарик. Они могут помещать крошечные частицы внутрь двух шестерен и перемещать частицы таким образом, чтобы обе шестерни вращались. Возможен также более упорядоченный паттерн, когда каждая частица сохраняет одинаковое расстояние до своего соседа. Все эти различные режимы и формы движения достигаются за счет внешних вычислений: алгоритм запрограммирован на создание вращающегося или колеблющегося магнитного поля, которое запускает желаемое движение и возможность реконфигурации.
«В зависимости от того, как мы меняем магнитные поля, диски ведут себя по-разному. Мы настраиваем одну силу, затем другую, пока не получим желаемое движение. Если мы слишком сильно вращаем магнитное поле внутри катушек, сила, которая заставлять воду двигаться слишком сильно, и диски удаляются друг от друга. Если мы вращаемся слишком медленно, то эффект cheerio, который притягивает частицы, слишком силен. Нам нужно найти баланс между тремя», — объясняет Гаурав Гарди. . Он доктор философии. студент факультета физического интеллекта MPI-IS и один из двух ведущих авторов публикации вместе со Стивеном Сероном из Корнельского университета.
Модель для будущих биомедицинских и экологических приложений
Будущий сценарий для таких коллективов микророботов должен стать еще меньше. «Наше видение состоит в том, чтобы разработать еще более крошечную систему, состоящую из частиц размером всего в один микрометр. Эти коллективы потенциально могут проникать внутрь человеческого тела и перемещаться в сложных средах, чтобы доставлять лекарства, например, блокировать или разблокировать проходы или стимулировать труднодоступную область», — говорит Гарди.
«Коллективы роботов с надежными переходами между моделями передвижения очень редки. Однако такие универсальные системы выгодны для работы в сложных условиях. Мы очень рады, что нам удалось разработать такой надежный и реконфигурируемый по требованию коллектив. Мы рассматриваем наше исследование как план будущих биомедицинских приложений, минимально инвазивных методов лечения или восстановления окружающей среды», — добавляет Метин Ситти, руководитель отдела физического интеллекта и пионер в области мелкомасштабной робототехники и физического интеллекта.