Четвероногий робот с намагниченными ногами может карабкаться по металлическим зданиям и конструкциям.
Трое исследователей из Корейского передового института науки и технологий вместе с коллегой из Университета Иллинойса в Урбана-Шампейн спроектировали и построили работающего четвероногого робота с намагниченными ногами, который может карабкаться по стенам и потолкам металлических зданий и структуры.
В своей статье, опубликованной в журнале Science Robotics , Сынву Хонг, Ён Ум, Хэ-Вон Пак и Джеджун Пак описывают своего робота и то, насколько хорошо он работал при тестировании в реальных условиях.
По мере совершенствования технологий, используемых для создания роботов, инженеры находят все больше способов их использования. В этой новой работе исследователи намеревались создать робота, который мог бы помогать в ремонтных работах на больших металлических конструкциях, таких как мосты, масляные резервуары и некоторые здания. Они сконструировали четвероногого робота, который мог ходить по плоской поверхности , затем приближаться к стене и ходить прямо по ее боку, как паук, а затем, при необходимости, продолжать движение по потолку.
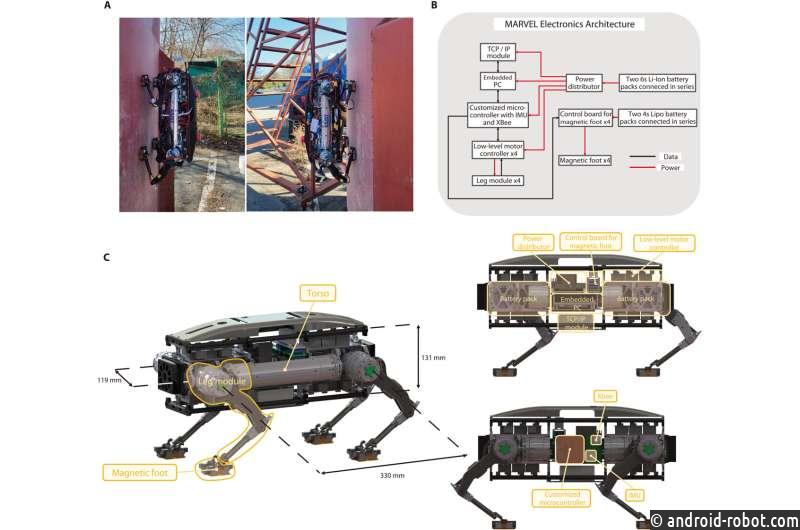
В роботе используются как магнитные эластомеры, так и электромагниты. Вместе они позволяют ножкам робота намагничиваться и размагничиваться по требованию. Включая и выключая магнетизм, робот может одной ногой цепляться за вертикальную точку на стене и держаться, пока другие ноги прилипают , а затем отпускать одну ногу за раз, чтобы делать шаги.
Исследователям также пришлось запрограммировать робота так, чтобы он позволял сначала начать подъем, а затем двигаться вокруг препятствий или преодолевать их. Для этого они смоделировали то, как кошка тестирует поверхность, прежде чем двигаться вперед, делая крошечные первые шаги передними лапами, прежде чем добавить действие задних лап.
Тестирование показало, что робот способен карабкаться по металлическим стенам и ходить по потолкам в их испытательной лаборатории. Дальнейшие испытания показали, что робот смог взобраться на старый открытый резервуар для хранения с оранжевыми от ржавчины стенками.
Он мог не только взбираться на танк, но и преодолевать места, где не хватало металла, и обходить препятствия. Также было обнаружено, что он способен нести полезную нагрузку до 3 кг. Он движется с переменной скоростью в зависимости от местности, с максимальной скоростью 0,7/мс.